Содержание.
1. Задание на курсовой проект
2. Введение
3. Анализ технического задания, эксплуатации РЛС
4. Выбор метода измерения дальности
5. Расчет параметров РЛС
6. Расчет габаритов антенны
7. Выбор типа индикатора
8. Энергетический расчет системы
9. Структурная схема РЛС
10.Список литературы
1. Введение.
Радиолокация – это область радиоэлектроники, решающая задачи радиолокационного наблюдения различных объектов, то есть их обнаружения, измерения координат и параметров движения, а так же выяснение некоторых структурных или физических свойств путем использования отраженных или пере излученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Устройства радиолокационного наблюдения называются радиолокационными станциями или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями. При использовании отраженных радиоволн радиолокационными целями являются любые неоднородности электрических параметров среды, В которой распространяется первичная волна. Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения: радиолокация с пассивным ответом, радиолокация с активным ответом, пассивная радиолокация.
2. Задание на курсовую работу.
Вариант
А =2 – самолетная РЛС
В = 1 – радиовысотомер больших высот
Цифровой индикатор с подробной проработкой функциональной схемы.
3. Анализ технического задания, эксплуатация РЛС.
В силу того , что радиолокационная станция является самолетной, то накладываются жесткие требования к габаритам РЛС. Так как антенна более всего определяет размеры РЛС, то это требование в большей степени относится к ней.
При развороте самолет начинает крениться, в результате чего возникает ошибка измерения высоты. Чтобы исключить ошибку необходимо закрепить антенну на балансирующем устройстве, в результате работы которого главный лепесток диаграммы направленности антенны направляется перпендикулярно земной поверхности.
В высотомерах, как правило, используются сигналы с непрерывным излучением, поэтому приходится использовать две антенны. Для того, чтобы не ухудшать аэродинамических свойств самолета, антенны помещают под специальные обтекатели, которые не препятствуют прохождению радиосигнала. В расчетах необходимо учесть, что самолет находится над разными типами земной поверхности, которые обладают различными отражающими свойствами.
4. Выбор метода измерения дальности. Его описание.
В качестве бортового высотомера обычно применяется РЛС с
частотной модуляцией. При этом имеется лишь одна цель – земная поверхность,
которую в первом приближении для гладкой поверхности можно считать точечной.
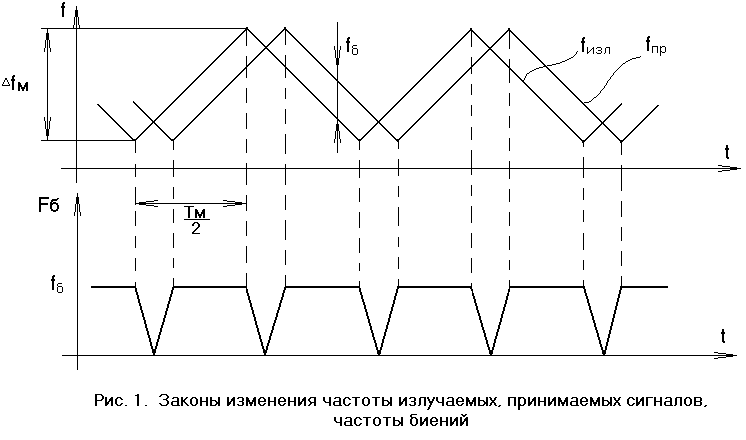
При частотном методе измерения дальности излучается непрерывный сигнал, частота
которого ![]() изменяется по пилообразному закону Рис. 1.
Частота принимаемого сигнала
изменяется по пилообразному закону Рис. 1.
Частота принимаемого сигнала ![]() изменяется по тому же
закону, но с запаздыванием
изменяется по тому же
закону, но с запаздыванием  . Разность частот
принимаемого и излучаемого сигналов
. Разность частот
принимаемого и излучаемого сигналов ![]() (частота биений) на
линейных участках изменения этих частот определяется равенством:
(частота биений) на
линейных участках изменения этих частот определяется равенством:
 , где
, где ![]() -
скорость изменения частоты излучаемого сигнала.
-
скорость изменения частоты излучаемого сигнала.
 |
Если ![]() - девиация частоты передатчика,
- девиация частоты передатчика,  , - период модуляции излучаемых колебаний,
то
, - период модуляции излучаемых колебаний,
то  . Следовательно,
. Следовательно,
![]() ; (1),
; (1),
Из последнего выражения следует, что при измеренной частоте биений дальность объекта может быть определена по формуле:
 ; (2)
; (2)
Для нормальной работы высотомера, необходимо, чтобы
выполнялось условие  , при этом основная часть энергии
сигнала биений содержится
, при этом основная часть энергии
сигнала биений содержится
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




