Задача 2.9 (2.11)
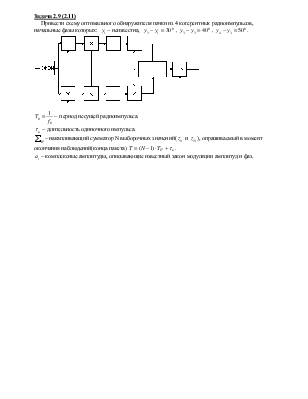
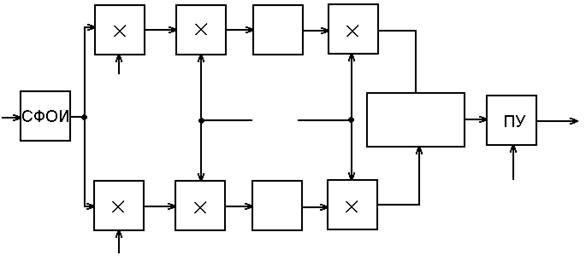
Привести схему оптимального
обнаружителя пачки из 4 когерентных радиоимпульсов, начальные фазы которых: ![]() неизвестна,
неизвестна, ![]() ,
, ![]() ,
, ![]() .
.
 период несущей радиоимпульса.
период несущей радиоимпульса.
![]() длительность одиночного
импульса.
длительность одиночного
импульса.
![]() накапливающий сумматор N выборочных значений(
накапливающий сумматор N выборочных значений(![]() и
и ![]() ), опрашиваемый в момент окончания
наблюдений(конца пакета)
), опрашиваемый в момент окончания
наблюдений(конца пакета) ![]() .
.
![]() комплексные амплитуды,
описывающие известный закон модуляции амплитуд и фаз.
комплексные амплитуды,
описывающие известный закон модуляции амплитуд и фаз.
Задача 2.24(2,26) Обнаруживаемый сигнал описывается соотношением
![]() В,
В, ![]() ,
где
,
где
![]() - случайная величина, а огибающая
- случайная величина, а огибающая ![]() принимает значения +1 и –1 в соответствии
с кодом «
принимает значения +1 и –1 в соответствии
с кодом «![]() », причём длительность одного элемента
составляет
», причём длительность одного элемента
составляет ![]() . При какой интенсивности помехи типа белый
шум вероятностей ложной тревоги и правильного обнаружения будут равны
. При какой интенсивности помехи типа белый
шум вероятностей ложной тревоги и правильного обнаружения будут равны ![]() и 0,9 соответственно? Изобразить схему
обнаружителя и определить порог.
и 0,9 соответственно? Изобразить схему
обнаружителя и определить порог.
Решение:
![]() При
При ![]()
![]()
![]() (0,55 дБ)- потери в пороговом устройстве
связанные со случайным характером фазы
(0,55 дБ)- потери в пороговом устройстве
связанные со случайным характером фазы
![]() - ОСШ необходимое для обнаружения сигнала с
вероятностями
- ОСШ необходимое для обнаружения сигнала с
вероятностями ![]() и
и ![]() со
случайной начальной фазой.
со
случайной начальной фазой.
![]() - ОСШ необходимое для детектирования
сигнала.
- ОСШ необходимое для детектирования
сигнала.

Энергия
сигнала:  Вт.
Вт.
т.к.
 Вт/Гц
Вт/Гц
Нормируемый
порог: ![]()

Задача 2.44 (2,42)
При обнаружении когерентной пачки
из двух импульсов с одмнаковыми амплитудами при настроенном приемнике получены
вероятности правильного обнаружения 0.95 и ложной тревоги ![]() . Из-за нестабильности начальная фаза
второго импульса неконтролируемо изменяется на
. Из-за нестабильности начальная фаза
второго импульса неконтролируемо изменяется на ![]() . Найти
зависимости F и D от
. Найти
зависимости F и D от ![]()
![]() .
.
Решение:
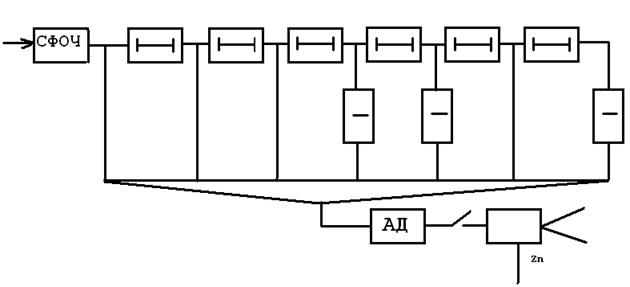
На рис.1 приведена функциональная схема приемника.
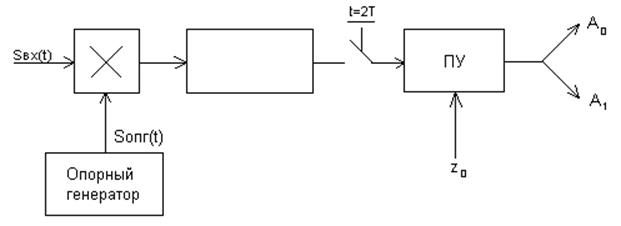
рис.1:Корреляционный приемник Котельникова.
ü Запишем выражения для входного сигнала и сигнала с опорного генератора:
![]() ;
;
![]() ;
Случайное изменение фазы на величину
;
Случайное изменение фазы на величину
![]() ;
;
т.е. в умножителе перемножаются две косинусоиды с различными значениями начальных фаз.

Корреляционный интеграл:

При S=1 и
при ![]()
![]()
Вероятность ложной тревоги
определяется выражением:
Вероятность правильного обнаружения определяется выражением:
Для получения зависимостей
требуемых в условии необходимо найти ![]() и
и ![]() .
.
Чтобы найти значения этих характеристик воспользуемся интегралом вероятности.
Сделаем замену переменных: =>
=> 
ü
По кривой интеграла вероятности находим x
где  для случая
для случая ![]() :
:
![]()
По кривой интеграла вероятности находим x где  для случая
для случая ![]() :
:
![]()
При несмещенной фазе(начальное
условие) равной нулю и условно принятого нами T=1 ![]() получаем систему уравнений:
получаем систему уравнений:
 В результате решения данной системы
получаем:
В результате решения данной системы
получаем:![]()
![]()
Результаты подставляем в ниже приведенные выражения, причем предел интегрирования со стороны бесконечности для удобства вычислений заменяем определенным числом, например числом 20.
Вероятность ложной тревоги:
Вероятность правильного
обнаружения:
Построим эти зависимости, причем уже из формулы определения вероятности ложной тревоги, видно, что от фазы она не зависит и представляет из себя определенную const.
Графики зависимостей вероятностей от фазы второго импульса когерентной пачки.
Задача 2.86 (2,94)
Дискретная независимая выборка ![]() принадлежит экспоненциальному распределению
принадлежит экспоненциальному распределению
 ;
; ![]() ,
содержащему неизвестный параметр
,
содержащему неизвестный параметр ![]() . Определить значение
. Определить значение ![]() оценки максимального правдоподобия, а
также найти смещение и дисперсию этой оценки . Сопоставить дисперсию с нижней
границей, определяемой неравенством Крамера-Рао, и сделать вывод об
эффективности оценки.
оценки максимального правдоподобия, а
также найти смещение и дисперсию этой оценки . Сопоставить дисперсию с нижней
границей, определяемой неравенством Крамера-Рао, и сделать вывод об
эффективности оценки.
Найдем совместную плотность
распределения вероятности ![]() , так как выборка
независима она равна.
, так как выборка
независима она равна.
 ;
;
ü Проверим оценку на
несмещенность:
Отсюда, делаем, вывод—оценка является несмещенной.
ü Найдем дисперсию
оценки:
![]()
ü Сравним дисперсию с нижней границей определяемой неравенством Крамера-Рао:
Для несмещенной оценки при
большом числе выборки, т.е. при ![]() неравенство,
приведенное выше, превращается в равенство. Таким образом, при бесконечно большом
n, дисперсия оценки совпадает с нижней границей
Крамера-Рао.
неравенство,
приведенное выше, превращается в равенство. Таким образом, при бесконечно большом
n, дисперсия оценки совпадает с нижней границей
Крамера-Рао.
ü Эффективность оценки:
Полученная оценка ,которая обращает неравенство Крамера-Рао в равенство, называется эффективной.
Задача 2.87 (2,95)
Азимут маневрирующей цели описывается стахостатическим
разностным уравнением ![]() град., в котором
град., в котором ![]() дискретное время;
дискретное время; ![]() информационный
гауссовский шум с параметрами
информационный
гауссовский шум с параметрами ![]() . В результате работы
пеленгатора формируются первичные измерения:
. В результате работы
пеленгатора формируются первичные измерения:![]() , содержащие некоррелированный гауссовский шум измерений
, содержащие некоррелированный гауссовский шум измерений ![]() с дисперсией
с дисперсией ![]() и
нулевым средним. Записать алгоритм фильтра Калмана, осуществляющего вторичную
обработку (сглаживание) измерений. Определить дисперсию сглаженных оценок и
найти выигрыш в точности, обусловленный сглаживанием, как в динамике так и в
установившемся состоянии.
и
нулевым средним. Записать алгоритм фильтра Калмана, осуществляющего вторичную
обработку (сглаживание) измерений. Определить дисперсию сглаженных оценок и
найти выигрыш в точности, обусловленный сглаживанием, как в динамике так и в
установившемся состоянии.
Решение:
Запишем уравнение наблюдения:
Запишем уравнение сообщения:
Задача 2.88 (2,102)
Дальность цели изменяется по закону: ![]() , км;
, км; ![]() , где
, где ![]() - информационный белый шум,
- информационный белый шум, ![]() ,
, ![]() .
. ![]() ,
, ![]() -
независимый гауссовский шум. Получаемая в результате оценка дальности имеет
дисперсию
-
независимый гауссовский шум. Получаемая в результате оценка дальности имеет
дисперсию ![]() км2. Найти алгоритм сжатия и
дисперсию шума
км2. Найти алгоритм сжатия и
дисперсию шума ![]() .
.
Решение![]()
1) ![]() , где
, где ![]() - в
общем случае
- в
общем случае
![]()
![]() - сообщение,
- сообщение, ![]() -
наблюдение. Исходя из этого, можно записать:
-
наблюдение. Исходя из этого, можно записать: ![]() ,
причем
,
причем ![]() ,
, ![]()
![]() ;
; ![]() , где
, где ![]() , а
, а ![]()
2) Имеем
формулу: ![]()
Для
нашего случая это выглядит так: ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() -
неизвестное.
-
неизвестное.
Получаем:  ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Ответ: ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.