

Лабораторная работа №2
Цель работы: изучение основных принципов работы систем передачи двоичной информации и исследование причин возникновения ошибок.
На сегодняшний день цифровые системы обработки и передачи информации становятся всё более и более актуальными. Повсеместно происходит замена аналоговых систем обработки и передачи информации цифровыми системами. Этому есть несколько причин: цифровые системы обладают большей помехоустойчивостью, надёжностью, имеют большую стабильность параметров. Кроме того, цифровые системы передачи информации позволяют реализовать более сложные алгоритмы обработки, и соответственно, обладают большим потенциалом. Современный радиоинженер должен знать принципы работы и устройство систем передачи двоичной информации.
Двоичным (бинарным) сигналом является последовательность нулей и единиц. Источником бинарной последовательности могут быть
1. звуковой сигнал (речь, музыка),
2. динамичное или статичное изображение (фотография, видеосигнал),
3. последовательность символов (текст),
4. произвольная последовательность чисел.
Первый и второй источники для получения двоичной последовательности подвергают импульсно – кодовой модуляции (ИКМ), остальные необходимо подвергнуть предварительному кодированию. В любом случае имеется последовательность нулей и единиц, которую необходимо передать по каналу связи.
Наиболее распространённым каналом связи является радиоэфир. Для передачи сигнала в эфире используется модулированный гармонический сигнал вида
![]() (1)
(1)
В качестве информационного параметра может выступать
амплитуда![]() , частота
, частота![]() или фаза
или фаза![]() . Соответственно с этим различают
амплитудную, частотную и фазовую модуляции. При передаче двоичного сигнала
информационный параметр принимает только два значения, и речь идёт о
манипуляции сигнала
. Соответственно с этим различают
амплитудную, частотную и фазовую модуляции. При передаче двоичного сигнала
информационный параметр принимает только два значения, и речь идёт о
манипуляции сигнала
АМ:  (2)
(2)
ЧМ:  (3)
(3)
ФМ:  . (4)
. (4)
Целью данной работы является изучение принципов работы и показателей качества работы системы передачи информации (СПИ) с амплитудной модуляцией.
 |
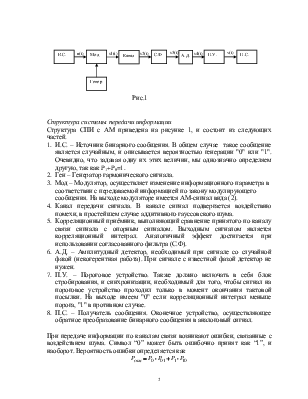
Структура системы передачи информации
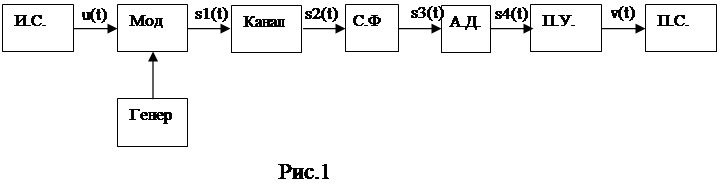
Структура СПИ с АМ приведена на рисунке 1, и состоит из следующих частей.
1. И.С. – Источник бинарного сообщения. В общем случае такое сообщение является случайным, и описывается вероятностью генерации "0" или "1". Очевидно, что задавая одну их этих величин, мы однозначно определяем другую, так как P1+P0=1.
2. Ген – Генератор гармонического сигнала.
3. Мод – Модулятор, осуществляет изменение информационного параметра в соответствии с передаваемой информацией по закону модулирующего сообщения. На выходе модуляторе имеется АМ-сигнал вида (2).
4. Канал передачи сигнала. В канале сигнал подвергается воздействию помехи, в простейшем случае аддитивного гауссовского шума.
5. Корреляционный приёмник, выполняющий сравнение принятого по каналу связи сигнала с опорным сигналом. Выходным сигналом является корреляционный интеграл. Аналогичный эффект достигается при использовании согласованного фильтра (С.Ф).
6. А.Д. – Амплитудный детектор, необходимый при сигнале со случайной фазой (некогерентная работа). При сигнале с известной фазой детектор не нужен.
7. П.У. – Пороговое устройство. Также должно включать в себя блок стробирования, и синхронизации, необходимый для того, чтобы сигнал на пороговое устройство проходил только в момент окончания тактовой посылки. На выходе имеем "0" если корреляционный интеграл меньше порога, "1" в противном случае.
8. П.С. – Получатель сообщения. Оконечное устройство, осуществляющее обратное преобразование бинарного сообщения в аналоговый сигнал.
При передаче информации по каналам связи возникают ошибки, связанные с воздействием шума. Символ “0” может быть ошибочно принят как “1”, и наоборот. Вероятность ошибки определяется как
![]()
где
![]() - вероятность передачи “0” и “1”
соответственно,
- вероятность передачи “0” и “1”
соответственно, ![]() это вероятности перепутывания
нуля с единицей и единицы с нулём соответственно. При полном отсутствии шума
сигнал на выходе корреляционного приёмника (или согласованного фильтра) в
момент сравнения его с порогом будет детерминированным, и равным
это вероятности перепутывания
нуля с единицей и единицы с нулём соответственно. При полном отсутствии шума
сигнал на выходе корреляционного приёмника (или согласованного фильтра) в
момент сравнения его с порогом будет детерминированным, и равным
При наличии шума сигнал на выходе согласованного фильтра становится случайным, с распределением плотности вероятности w(s) (см. рис. 2.).
Для равновероятного источника (![]() ) вероятность ошибки
будет
) вероятность ошибки
будет
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.