Федеральное агентство железнодорожного транспорта
Сибирский государственный университет путей сообщения
Кафедра «Электротехника, диагностика и сертификация»
Расчетно-графическая работа по дисциплине
“Управление техническими системами ”
Пояснительная записка
Руководитель: Разработал:
студент гр. М-412
_________ Слайковская В.А. __________ Вансовский И.А.
(подпись) (подпись)
________________ _______________
(дата проверки) (дата сдачи на проверку)
Краткая рецензия:
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
___________________
(запись о допуске к защите)
____________________ __________________
(оценка по результатам защиты) (подпись преподавателей)
2012
1 СОСТАВЛЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ СИСТЕМЫ
Разделение системы автоматического регулирования на основные функциональные элементы и составление функциональных схем позволяет четче представлять как физические процессы, происходящие в системе, так и взаимодействие ее элементов, а также провести расчет основных режимов работы системы.
Сложная автоматическая система выполняет одновременно две задачи:
1) обеспечивает с требуемой точностью изменение выходной величины в соответствии с поступающей извне входной величиной, играющей роль команды или программы (задача слежения);
2) при заданном значении входной величины система нейтрализует действие внешних возмущений, стремящихся отклонить выходную величину от заданного значения (задача регулирования или стабилизации).
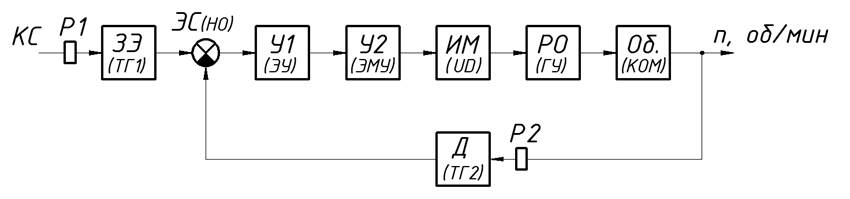
Рисунок 2 – Функциональная схема системы
Контролируемая величина – частота вращения колеса отвального моста КОМ. Она контролируется датчиком Д в виде тахогенератора ТГ2. Сигнал в виде напряжения, выработанного тахогенератором идет на элемент сравнения ЭС представленный нуль-органом НО. Одновременно на элемент сравнения приходит сигнал, также в виде напряжения, от задающего элемента ЗЭ представленного тахогенератором ТГ1. На основании II закона Кирхгофа на выходе из НО будет U=│UТГ1 – UТГ2│, которое идет на первый усилитель У1 в виде электронного усилителя ЭУ. Из ЭУ выходит сигнал в виде анодного тока и идет на усилитель У2 в виде электромашинного усилителя ЭМУ. На ЭМУ он усиливается, и сигнал в виде напряжения идет на якорь двигателя UD. Двигатель начинает вращать гидроусилитель ГУ, который связан с колесом отвального моста. Частоты вращения колеса струга и колеса отвального моста выравниваются
2 КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТ СИСТЕМЫ. ВЫБОР ЭЛЕМЕНТОВ И СОГЛАСОВАНИЕ ИХ ПАРАМЕТРОВ
Выбор элементов производится по паспортным данным этих элементов, которые соответствуют номинальному режиму работы. Для нуль-органа, состоящего из двух высокоомных сопротивлений, коэффициент преобразования равен 0,5. Коэффициент преобразования гидроусилителя принят 1.
2.1 Выбор двигателя
Мощность двигателя Р, Вт:
 , (1)
, (1)
где М – крутящий момент на валу гидроусилителя, М = 0,78 кН∙м; ω – угловая скорость шпинделя гидронасоса, рад/с; η – КПД привода, η = 0,7.
Угловая скорость шпинделя гидронасоса ω, рад/с:
 , (2)
, (2)
где n – частота вращения шпинделя гидронасоса, n = 90 об/мин.

Принят электродвигатель постоянного тока типа 2ПО160LУХЛ4 с параметрами:
напряжение, В..................................................................................................220;
мощность на валу, кВт......................................................................................10;
частота вращения, об/мин.............................................................................2200;
сопротивление якоря, Ом.............................................................................0,167;
сопротивление обмотки возбуждения, Ом....................................................890;
сила тока якоря, А...........................................................................................40,2.
Коэффициент преобразования двигателя кдв:
 (3)
(3)
где U – напряжение, подведенное к якорной обмотке двигателя, U = 220 В; nхх – число оборотов двигателя на холостом ходу, об/мин:
 (4)
(4)

2.2 Выбор тахогенераторов и редукторов
При выборе тахогенераторов необходимо учитывать наличие зоны нечувствительности ( при малой частоте вращения якоря напряжение на выходе тахогенератора практически отсутствует). Поэтому применены повышающие редукторы с коэффициентом преобразования кр = 10.
Принят тахогенератор ТД-201 с параметрами [1]: номинальное напряжение, В...........................................................................128;
удельная мощность, Вт/об/с.........................................................................0,077;
сопротивление обмотки якоря, Ом.................................................................780;
максимальная сила тока нагрузки, А...............................................................0,2;
максимальная частота вращения, об/мин.....................................................1000.
Коэффициент преобразования тахогенератора ктг:
 (5)
(5)
где Uтг – напряжение на выходе тахогенератора, Uтг = 128В; nтг – частота вращения якоря тахогенератора, nтг = 1000 об/мин.
2.3 Выбор электромашинного усилителя
Принят электромашинный усилитель ЭМУ-100 со следующими параметрами [1]:
напряжение, В...................................................................................................230;
мощность, кВт.....................................................................................................10;
сила тока, А......................................................................................................43,5;
омическое сопротивление 1 обмотки, Ом.....................................................8,16;
номинальная сила тока управления, мА.........................................................320.
Коэффициент преобразования ЭМУ, кэму:
 (6)
(6)
где Uдв – напряжение на якорных зажимах исполнительного двигателя, Uдв = 220 В; Iу1 – сила тока в 1 обмотке управления ЭМУ, Iу1 = 0,32 А; Rу1 - сопротивление 1 обмотки управления ЭМУ, Rу1 = 8,16 Ом.
Добротность системы Д, с-1:
 (7)
(7)
где ω – скорость слежения, ω = 45 град∙с-1; δ – скоростная ошибка, δ = 1 град.
С другой стороны добротность равна:
![]() (8)
(8)
Отсюда:


3 ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ЗВЕНЬЕВ. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ СИСТЕМЫ
Передаточная функция нуль-органа Wно(s):
![]() (9)
(9)
Передаточные функции редукторов Wр(s):
![]() (10)
(10)
Передаточные функции тахогенераторов Wтг(s):
![]() (11)
(11)
Передаточная функция электронного усилителя Wэу(s):
![]() (12)
(12)
Передаточная функция двигателя Wдв(s):
 (13)
(13)
где ТМ – электромеханическая постоянная, ТМ = 0,1 [1].
Передаточная функция ЭМУ Wэму(s):
 (14)
(14)
где Т – сумма постоянных времени цепи обмотки управления и поперечной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.