1 Приводы виброплит ВПО-3-3000
Схема подвески виброплит:
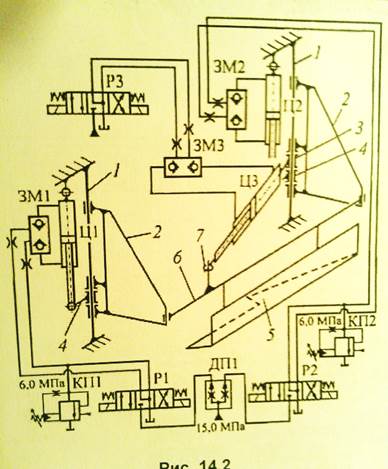
1-напрвляющие колонны; 2-подъемно поворотные кронштейны; 3-обойма; 4-пром. кронштейны; 5-виброплита; 6-продольная балка; 7-вертикальная ось; Ц1, Ц2-гидроцилиндры вертикального перемещения виброплиты; Ц3-гидроцилиндр перемещения виброплиты в сторону; ДП1-делитель потока; ЗМ1, ЗМ2, ЗМ3-гидрозамки; ДП1-обеспечивает синхронизацию перемещения переднего и заднего концов балки при подъеме и опускании виброплиты; Р1,Р2-вкл одновременно например при опускании виброплиты Р2(п.р.п);Р1(л.р.п).
Назначение ГЗ:
-фиксирует положение штоков Ц;
-предотвращает самопроизвольное опускание и поперечное перемещение виброплиты при обрыве РВД.
2 Приводы ПРУ
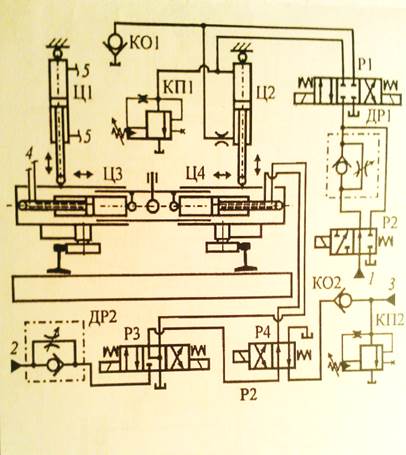
Ц1,Ц2-гидроцилиндры подъема и опускания РШР; Ц3,Ц4-гидроцилиндры сдвига решетки в плане; 1,2-гидролинии гидросистемы (12,5 МПа); 3,4-гидролии привода рихтовки; 5-гидролии подъема выправки.
Привод подъемки выправки
При подъеме опускании ПРУ(транспортное-рабочее положение ПРУ)
Штоки Ц1,Ц2 перемещаются с повышенной скоростью.
Для подъема ПРУ: Вкл Р2(л.р.п), вкл Р1(п.р.п), МГ идет минуя ДР1: 1-Р2(л.р.п)-Р1(п.р.п)-Ц2(ш.п).
Для точной выправки пути в продольном профиле и по уровню требуется замедленная скорость штока Ц2.
Для этого выкл (л.р.п), МГ идет: Ц2(п.п)-КП1-Б. Б-КО1-Ц2(ш.п)
Привод рихтовки.
Для сдвига пути в рабочем режиме вправо (или выдвижения телескопической балки): вкл Р3(п.р.п), выкл Р4(п.р.п) МГ идет: 2-ДР2-Р3(л.р.п)-Р4(п.р.п)-Ц3(п.п)-Ц4(ш.п)-Р3(л.р.п)-Б.
При сдвиге пути влево (за счет Ц3) во избежании сброса РШР, необходимо сохранять контакт правого рихтовочного ролика и рельса. Для этого вкл Р3(л.р.п) вкл Р4(л.р.п) МГ идет: Ц4(п.п)-Р4(л.р.п)-КО2-КП2-Б.
Для приведения ПРУ в транспортное положение вкл Р3(п.р.п).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.