Боковое слежение осуществляет поддержку водителя при обнаружении автомобилей в мертвых зонах, находящихся сзади слева, чтобы обеспечить безопасное перестроение на автомагистралях.
Основным средством слежения является радар ближнего действия, работающий на частоте 23 ГГц. Также существуют системы с видео наблюдением, системы работающие на ультразвуке (работают в условиях низких скоростей), работающие на лидарах (лазерных рдарах).
1. Радарные системы. Система VORAD на тяжелых грузовиках с радаром Доплера. Датчик устанавливался на правом углу грузовика, а рабочая зона слежения была 0,5 – 3м, покрывающая соседнюю полосу движения. Система Valeo Raytheon использует радар 24 ГГц для контроля мертвой зоны с обеих сторон автомобиля. При попадании автомобиля в мертвую зону, система подает сигнал тревоги водителю, включая иконки на панели приборов. Диапазон работы расширен до 40 м и угла зрения 150 градусов. Датчики вмонтированы в задний бампер.
Основным для всех систем контроля мертвых зон является то, что они не должны подавать тревогу на неподвижные объекты, на обгоняющие автомобили, не представляющие опасности.
2. Видеосистемы. Видео датчики размещаются на боковых зеркалах заднего вида и контролируют обе стороны движения. Система различает местоположение полос движения всех обнаруженных автомобилей. Она не подает сигналов тревоги, если автомобили находятся не на соседних полосах. При отсутствии разметки степень опасности определяется на основании боковой дистанции приближающегося или обгоняющего автомобиля. Сигнал тревоги включается тогда, когда автомобиль на соседней полосе не позволяет осуществить безопасный маневр смены полосы.
3. Ультразвуковое боковое обнаружение объектов для городских автобусов. В Питсбурге на автобусах использовалось множество ультразвуковых датчиков, встроенных в пластиковый молдинг, вдоль борта автобуса. Это позволило снизить аварийность в 3 раза!
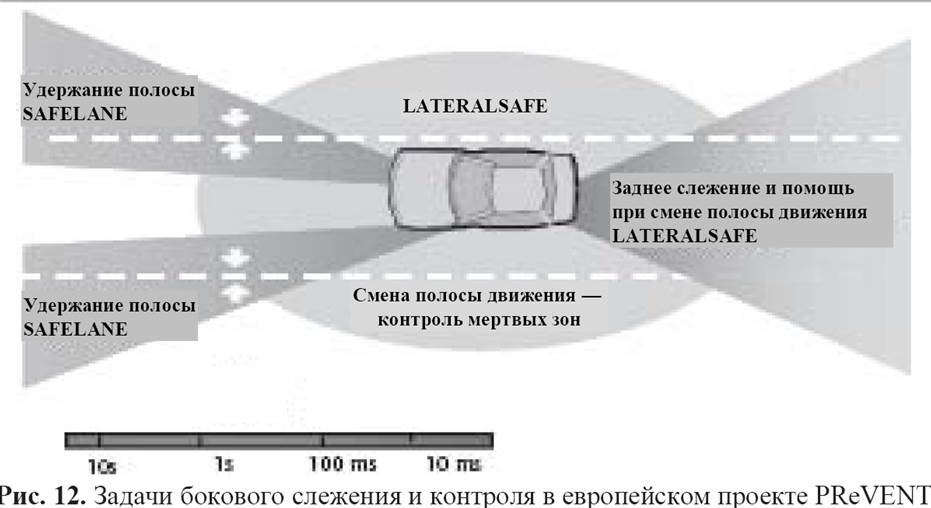
1. Немецкая научно-исследовательская программа INVENT включает систему LCA как одну из подзадач в направлении Обнаружения и интерпретации окружения при вождении и активной безопасности. Данная система включает в себя предупреждение отклонения с полосы движения, контроль мертвых зон, помощь при перемене полосы движения. Некоторые ее функции направлены специально на облегчение задач управления тяжелыми грузовиками, например, при порывах ветра, в виражах и тоннелях, посредством автоматической коррекции в рулевом механизме. Реализуются вмешательства в торможение и управление, чтобы помочь водителю удержаться на полосе движения или дороге при опасности потери управления, а также чтобы улучшить ориентацию автомобиля на полосе движения (снижение скорости перед поворотом).
2. Первая европейская научно-исследовательская работа в помощи удержания полосы движения SAFELAN. Особенностью проекта являлась реализация систем, которые поддерживают водителя при неблагоприятных условиях и условиях ограниченной видимости. В этих технологиях также были интегрированы системы мониторинга водителя и боковое слежение для всех дорожных сценариев.
Эти системы используют сложные алгоритмы для обнаружения сил переворачивания и активируют дифференциальное торможение колес, чтобы компенсировать и предотвратить переворачивание.
Риск опрокидывания вычисляется на основе прямого измерения бокового ускорения и оценки центра тяжести автомобиля. Центр тяжести определяется на основе модели распределения нагрузки и вычисления массы автомобиля. Масса вычисляется путем сопоставления крутящего момента ДВС и полученного ускорения, принимая во внимание и другие факторы, например, размер шин. Чтобы уменьшить скорость система вмешивается или в управление двигателем, или в тормозную систему. Также используются акселерометры, ABS и система управления крутящим моментом (трекшн-контрол) тягача.
Системы используются на спортивных автомобилях и грузовиках.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.