






ФБОУ ВПО НГАВТ
Кафедра Прикладной механики.
Расчетно–графическая работа
Структурный анализ и синтез механизмов.
Вариант №18.
Выполнила:
Студенка группы УВТ-21Б
Смирнова Ирина
Проверил:
Загоровский Владимир Викторович
Новосибирск
2014
Структурный анализ
1,2) Составим схему механизма и структурную схему механизма.
Составляем структурную схему механизма:
3) Определяем подвижность механизма.
W = 3n – 2p
где, W – подвижность ( число степеней свободы механизма);
n – число подвижных звеньев;
p – число одноподвижных кинематических пар;
n = 7;
p = 10;
W = 3*7 - 2*10 = 1
4) Определяем характер абсолютного движения звеньев.
0 – стойка – неподвижное звено;
1 – криваши – вращательное движение;
2 – шатун – плоско - параллейное движение;
3 – криваши – вращательное движение;
4 – ползун – поступательное движение;
5 - ползун – поступательное движение;
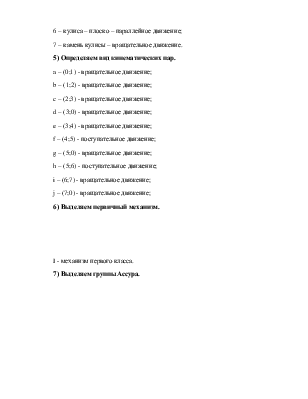
6 – кулиса – плоско – параллейное движение;
7 – камень кулисы – вращательное движение.
5) Определяем вид кинематических пар.
a – (0;1) - вращательное движение;
b – (1;2) - вращательное движение;
c – (2;3) - вращательное движение;
d – (3;0) - вращательное движение;
e – (3;4) - вращательное движение;
f – (4;5) - поступательное движение;
g – (5;0) - вращательное движение;
h – (5;6) - поступательное движение;
i – (6;7) - вращательное движение;
j – (7;0) - вращательное движение;
6) Выделяем первичный механизм.
I - механизм первого класса.
7) Выделяем группы Ассура.
8) Записываем структурную формулу (формулу строения) механизма.
I II (2;3) II (4;5) II (6;7)
9) Определяем класс и порядок всего механизма.
Класс – II
Порядок – 2
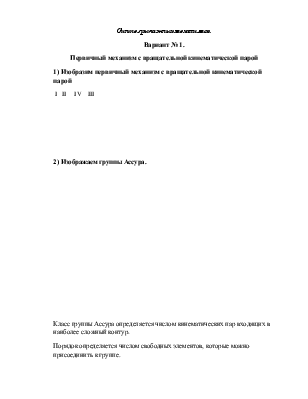
Синтез рычажных механизмов.
Вариант № 1.
Первичный механизм с вращательной кинематической парой
1) Изобразим первичный механизм с вращательной кинематической парой
I II IV III
2) Изображаем группы Ассура.
Класс группы Ассура определяется числом кинематических пар входящих в наиболее сложный контур.
Порядок определяется числом свободных элементов, которые можно присоединить к группе.
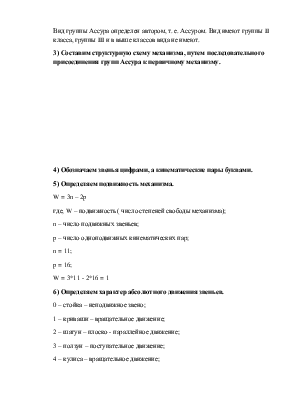
Вид группы Ассура определен автором, т. е. Ассуром. Вид имеют группы II класса, группы III и в выше классов вида не имеют.
3) Составим структурную схему механизма, путем последовательного присоединения групп Ассура к первичному механизму.
4) Обозначаем звенья цифрами, а кинематические пары буквами.
5) Определяем подвижность механизма.
W = 3n – 2p
где, W – подвижность ( число степеней свободы механизма);
n – число подвижных звеньев;
p – число одноподвижных кинематических пар;
n = 11;
p = 16;
W = 3*11 - 2*16 = 1
6) Определяем характер абсолютного движения звеньев.
0 – стойка – неподвижное звено;
1 – криваши – вращательное движение;
2 – шатун – плоско - параллейное движение;
3 – ползун – поступательное движение;
4 – кулиса – вращательное движение;
5 - шатун – поступательное движение;
6 – шатун – поступательное движение;
7 – кулиса – вращательное движение;
8 - кулиса – вращательное движение;
9 – кулиса - плоско - параллейное движение;
10 - криваши – вращательное движение;
11 - криваши – вращательное движение;
7) Определяем вид кинематических пар.
а - (0;1) - вращательное движение;
б – (1;2) - вращательное движение;
в – (2;3) - поступательное движение;
г – (3;0) - поступательное движение;
д – (3;4) - вращательное движение;
е – (4;5) - вращательное движение;
ж – (5;7) - вращательное движение;
з – (4;6) - вращательное движение;
и – (6;7) - вращательное движение;
к – (0;7) - поступательное движение;
л – (7;8) - вращательное движение;
м – (8;9) - вращательное движение;
н - (9;10) - вращательное движение;
о – (10;0) - вращательное движение;
п – (9;11) - вращательное движение;
р – (11;0) - вращательное движение.
Вариант №2.
Первичный механизм с поступательной кинематической парой.
1) Изобразим первичный механизм с поступательной кинематической парой
I II IV III
2) Изображаем группы Ассура.
Класс группы Ассура определяется числом кинематических пар входящих в наиболее сложный контур.
Порядок определяется числом свободных элементов, которые можно присоединить к группе.
Вид группы Ассура определен автором, т. е. Ассуром. Вид имеют группы II класса, группы III и в выше классов вида не имеют.
3) Составим структурную схему механизма, путем последовательного присоединения групп Ассура к первичному механизму.
4) Обозначаем звенья цифрами, а кинематические пары буквами.
5) Определяем подвижность механизма.
W = 3n – 2p
где, W – подвижность ( число степеней свободы механизма);
n – число подвижных звеньев;
p – число одноподвижных кинематических пар;
n = 11;
p = 16;
W = 3*11 - 2*16 = 1
6) Определяем характер абсолютного движения звеньев.
0 – стойка – неподвижное звено;
1 – ползун – поступательное движение;
2 – шатун – плоско - параллейное движение;
3 – ползун – поступательное движение;
4 – кулиса – вращательное движение;
5 - шатун – поступательное движение;
6 – шатун – поступательное движение;
7 – кулиса – вращательное движение;
8 - кулиса – вращательное движение;
9 – кулиса - плоско - параллейное движение;
10 - криваши – вращательное движение;
11 - криваши – вращательное движение;
7) Определяем вид кинематических пар.
а - (0;1) - поступательное движение;
б – (1;2) - вращательное движение;
в – (2;3) - поступательное движение;
г – (3;0) - поступательное движение;
д – (3;4) - вращательное движение;
е – (4;5) - вращательное движение;
ж – (5;7) - вращательное движение;
з – (4;6) - вращательное движение;
и – (6;7) - вращательное движение;
к – (0;7) - поступательное движение;
л – (7;8) - вращательное движение;
м – (8;9) - вращательное движение;
н - (9;10) - вращательное движение;
о – (10;0) - вращательное движение;
п – (9;11) - вращательное движение;
р – (11;0) - вращательное движение.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.