В переходном режиме регулируемая величина x(t) изменяется, причем
x(t) = xпер(t) + xуст(t), (1)
где xуст(t) - установившееся значение регулируемой величины;
xпер(t) - переходная составляющая, изменяющаяся во времени в течение переходного процесса.
Если переходная составляющая с течением времени стремится к нулю (затухает), то система называется устойчивой. Устойчивость - это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Однако, что хорошо известно из практики, присоединение регулятора может привести к тому, что при малейшем воздействии на САР в ней начинается незатухающий (расходящийся) переходный процесс ухода из исходного состояния. В этом случае САР является неустойчивой и непригодной для эксплуатации.
Устойчивость САР является необходимым, но далеко не достаточным условием ее практической пригодности. Существенное значение имеет еще качество переходных процессов, которое определяется следующими основными показателями.
1 Время переходного процесса tпер - интервал времени от начала переходного процесса до момента, когда отклонение регулируемой величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ε. Обычно ε принимается равной 5% от нового установившегося значения (рисунок 1.3).
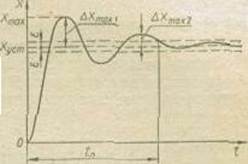
Рисунок 1.3 – К определению показателей качества переходных процессов.
2 Перерегулирование σ - это величина, характеризующая максимальное отклонение регулируемой величины во время переходного процесса. Обычно перерегулирование выражается в процентах от установившегося значения и определяется по формуле
σ =
3 Колебательность переходного процесса обычно определяется числом полных колебаний регулируемой величины за время переходного процесса. Колебательность можно оценивать также по величине степени затухания ψ, определяемой по формуле
ψ =
где значения Δxmax1 и Δxmax2 указаны на рисунке 1.3.
Практически переходный процесс при ψ ≥ 80% является вполне удовлетворительным.
Качество работы САР в установившемся режиме определяется ее точностью. В системах стабилизации точность оценивается величиной статической погрешности
Δ = x0 – xуст (4)
где x0 - заданное значение регулируемой величины;
xуст - установившееся значение регулируемой величины после окончания переходного процесса, вызванного постоянным по величине возмущением fст.
Статическая погрешность, приходящаяся на единицу возмущения
δст =
является мерой статической точности системы и называется статизмом.
Если известна статическая погрешность Δраз при разомкнутом состоянии САР (без регулятора), то статическая погрешность Δзам в замкнутой САР определяется по формуле
Δзам =
где К. - общий коэффициент усиления САР (произведение коэффициентов усиления звеньев одноконтурной САР),
Отсюда следует, что наиболее универсальным и эффективным методом повышения статической точности САР является увеличение общего коэффициента усиления за счет введения дополнительных усилителей.
Электронные устройства в САУ
В САУ применяются все виды электронных и ионных приборов и устройств рассмотренных выше. Какие бы сложные функции ни выполняли электронные устройства автоматического управления, они всегда строятся из более простых электронных узлов. К ним относятся:
1 усилители напряжения, тока, мощности;
2 генераторы колебаний различной формы;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.