По критерию Калмана в рассматриваемой системе ранг матрицы Q должен быть больше 0 для управляемой системы. Так как в данном проекте система уравнений состоит из двух уравнений, то n принят равным 2. Для анализа управляемости системы составлена матрица управляемости Q.
![]() . (3.21)
. (3.21)
 . (3.22)
. (3.22)
 .
.
Ранг матрицы равен rank(Q)=2 , так как матрица имеет две строки и два столбца.
Так как, количество переменных состояния n = rank(Q), следовательно, система управляема.
3.2.2 Анализ наблюдаемости
В рассматриваемой системе ранг матрицы N должен быть больше 0 для наблюдаемой системы. Для анализа наблюдаемости системы составлена матрица наблюдаемости N. Наблюдаема система будет тогда, когда rank(N)=n.
![]() (3.23)
(3.23)
После вычислений в программном средстве Mathcad она имеет вид:
Система наблюдаема, так как rank(N)=n=2.
3.3 Анализ устойчивости объекта
Так как модель обьекта управляема и наблюдаема, следовательно обьект является устойчив.
3.4 Определение настроек ПИ-регулятора
Выходной сигнал ПИ-регулятора пропорционален взвешенной сумме входного сигнала и интеграла от него.
ПИ – регулятор простыми средствами одновременно улучшает качество установившегося режима работы исходной статической САР, и сохраняет качество переходного, чем и обусловлено широкое распространение таких регуляторов.
Структурная схема исследуемой системы с ПИ – регулятором представлена на рисунке 3.5.
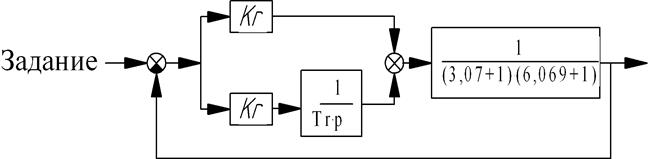
Рисунок 3.4 - Структурная схема системы с ПИ – регулятором
где Kr – пропорциональный коэффициент регулирования;
Tr – постоянная времени регулятора.
Рассчитаем параметры регулятора методом расширенной АФЧХ.
Основу метода составляет обобщенный критерий Найквиста:
Замкнутая система является устойчивой, если АФЧХ разомкнутой системы не охватывает точку −(-1,0) комплексной плоскости.
Построим АФЧХ полученной передаточной функции разомкнутой системы (рисунок 3.5):
Рисунок 3.5 – АФЧХ передаточной функции
V(ω) = Im(W(ω));
U(ω) = Re(W(ω)).
Так как АФЧХ передаточной функции не охватывает точку (-1,0) процесс
является устойчивым.
Разомкнутая линейная система, имеющая корневой показатель колебательности не хуже m, сохранит его и после замыкания отрицательной обратной связью, если расширенная АФЧХ разомкнутой системы:
![]() (3.24)
(3.24)
не охватывает на комплексной плоскости точку (-1;j×0),
где m – коэффициент запаса устойчивости (m=0,9);
Wраз(ω) - передаточная функция разомкнутой системы:
Wраз(ω) = Wo(ω)∙Wрег(ω), (3.25)
где Wo(ω) – передаточная функция объекта управления;
Wрег(ω) – передаточная функция регулятора.
В предельном случае расширенная АФЧХ должна проходить через точку (-1;j×0).
В теории автоматического управления доказывается, что в замкнутых
системах автоматического регулирования с ПИ-регулятором минимум интеграла от квадрата ошибки:
 (3.26)
(3.26)
достигается при
 , (3.27)
, (3.27)
где kрег – коэффициент передачи ПИ-регулятора;
Ти – постоянная времени интегрирования.
Расчет параметров ПИ-регулятора будем производить в программном средстве MathCAD.
Передаточная функция ПИ-регулятора как функция пока еще неизвестных параметров kr и Tr – коэффициента передачи и постоянной времени интегрирования регулятора:
 . (3.28)
. (3.28)
Составим передаточную функцию разомкнутой системы:
![]() .
.
Запишем в общем виде расширенную передаточную функцию разомкнутой системы:
![]() ,
,
ее действительную и мнимую части:
![]()
![]() .
.
Запишем функцию, максимум которой будет соответствовать оптимальным параметрам настройки регулятора:
 , (3.29)
, (3.29)
В программном средстве MathCAD, используя функцию maximaize, находим максимум функции F(ω,kr,Tr) со следующими ограничениями:
Функция F(ω,kr,Tr) будет будет максимальна если:
Kr = 1,117;
Ti = 6,138.
Построим переходную характеристику замкнутой системы при изменении задания на регулирование.
Передаточная функция замкнутой системы:
 . (3.30)
. (3.30)
Переходная функция определена стандартом пакетом программ MathCAD с использованными функциями:
 .
.
Результаты вычислений представлены на рисунке 3.6
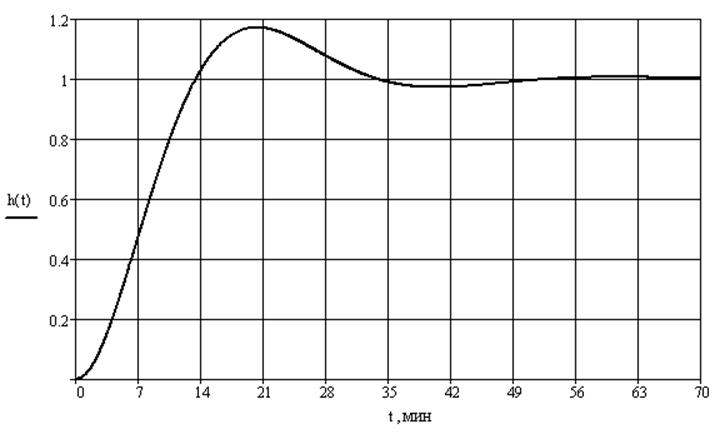
Рисунок 3.6 – Переходная характеристика замкнутой системы при определении оптимальных параметров настройки регулятора методом расширенной АФЧХ
Анализ качества системы управления:
Проведем проверку системы с ПИ-регулятором на качество:
Анализ выполняется по прямым.
Статические критерии качества:
Перерегулирование 17%.
Динамические критерии качества:
Время регулирования Трег = 30,94 мин;
Время нарастания Тнаростания = 13.44;
Скорость переходного процесса определяем по переходному процессу объекта регулирования:
α = 97.
Вывод: по сравнению с действующей системой были сформированы и решены основные задачи оптимизации системы управления, такие как составление разностоной математической модели обьекта управления. Был произведен анализ наблюдаемости и управляемости обьекта управления, анализ качества управления обьектаом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.