



ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
МАШИНОСТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ
УТВЕРЖДАЮ
______________Попов Ю.В.
«_____»_____________2005г.
ОБРАЗОВАТЕЛЬНЫЙ СТАНДАРТ
по специальности 210200 «Автоматизация технологических процессов и производств»
(код ОКСО 220301)
по дисциплине «Программное управление станками и комплексами»
Машиностроительный факультет
Очная форма обучения
|
Курс |
5 |
|
Семестр |
10 |
|
Всего часов по учебному плану |
204 |
|
Всего часов аудиторных занятий |
102 |
|
Лекции, час. |
51 |
|
Лабораторные занятия, час. |
34 |
|
Практические занятия, час |
17 |
|
СРС, всего часов по учебному плану |
102 |
|
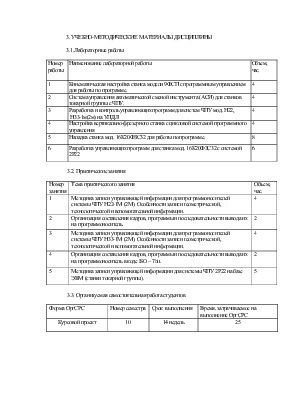
ОргСРС, час |
25 |
|
Экзамен (семестр) |
10 |
Рабочая программа составлена на основании ГОС ВПО и учебного плана по специальности 210200 "Автоматизация технологических процессов и производств".
Составители рабочей программы
Д.т.н., проф. Плотников А.Л.
К.т.н., доц. Неизвестных А.Г.
Рабочая программа утверждена на заседании кафедры "Автоматизация производственных процессов"
Протокол № от ___ _______________ 2005
Заведующий кафедрой
д-р. техн. наук, профессор Сердобинцев Ю.П.
Одобрено научно-методическим советом по направлению 550200 " Автоматизация и управление» машиностроительного факультета
Протокол № от ___ ______________ 2005
Председатель НМСН 550200
канд. техн. наук, доцент Косулин Г.А.
Декан факультета Карабань В.Г.
1. ЦЕЛЬ И ЗАДАЧИ УЧЕБНОЙ ДИСЦИПЛИНЫ
1.1. Цель преподавания дисциплины
Целью является изучение основных принципов построения системы программного управления металлообрабатывающего оборудования, установления класса задач на уровне станка, гибкого производственного модуля, изучение проблемно-ориентированных языков программирования системы управления станками (устройств ЧПУ) и раскрытие связей задач управления с архитектурой системы управления.
1.2.Задачи изучения дисциплины
Студент должен знать:
функциональные особенности программного управления металлорежущими станками, особенности аппаратных решений построения технологических устройств систем ЧПУ, особенности аппаратных решений построения технологических единиц оборудования с ЧПУ при разработке структур специализированных станков, станочных комплексов и модулей на базе современного технологического оборудования.
Студент должен уметь:
формализовать образ детали, организуя кодирование управляющей информации, читать схемные решения узлов систем ЧПУ, разрабатывать компоновки комплекса, модуля на базе станка с ЧПУ, разрабатывать диалоговый режим работы станка с ЧПУ и вспомогательного оборудования в комплексе, модуле.
1.3.Взаимосвязь учебных дисциплин
Дисциплина «Программное управление станками и комплексами» базируется на соответствующих разделах курсов «Технология машиностроения», «Оборудование машиностроительных производств», «Информатика», «Электроника», «Автоматизированный электропривод станков и промышленных роботов».
В свою очередь материалы данной дисциплины используются при изучении дисциплин «Автоматизация производственных процессов», «Роботизированные технологические комплексы» в курсовом и дипломном проектировании.
2. СОДЕРЖАНИЕ УЧЕБНОЙ ДИСЦИПЛИНЫ
«ПРОГРАММНОЕ УПРАВЛЕНИЕ СТАНКАМИ И КОМПЛЕКСАМИ»
|
Номер темы |
Название темы, наименование вопросов, изучаемых на лекциях |
Кол-во часов лекций |
Лабора-торные работы |
Практи-ческие занятия |
Метод. указания |
Форма контро- ля |
|
1 |
2 |
3 |
4 |
4 |
6 |
7 |
|
1 |
Функции программного управления |
3,4,7 |
1, 2 |
МУ-3, 4 МУ-7 |
КО, Экз |
|
|
1.1 |
Общие представления о принципах организации управления станками с программным управлением и создания гибких систем управления, задачи программного управления на уровне станка: геометрическая, логическая, технологическая, терминальная. |
2 |
ДЛ-6,7 |
|||
|
1.2 |
Геометрическая задача ЧПУ. Формализация образа детали, кодирование, интерполяция, управление приводами подач. |
2 |
||||
|
1.3 |
Логическая задача ЧПУ. Вспомогательные функции, циклы и операции. Программирование S, М, Т -функций. |
2 |
||||
|
1.4 |
Технологическая задача. Качество обработки в связи с особенностями начальной установки, управление эффективностью обработки. Структура адаптивного управления. |
2 |
||||
|
1.5 |
Терминальная задача ЧПУ. Анализ взаимодействия управления со средой. Диалоги оператора с устройством ЧПУ. Виртуальная клавиатура. Проектирование программ и их редактирование |
2 |
||||
|
2. |
Программирование систем управления. |
6,7 |
2, 3 |
МУ-6, 7 ДЛ-6, 7 |
КО, Экз. |
|
|
2.1 |
Управляющие программы станков. Код ISO - 7 bit. Формализм описания структуры и формат управляющих программ. |
2 |
||||
|
2.2 |
Повышения языкового уровня управляющих программ, стандартные циклы, готовые формы, обычные подпрограммы языка пользователя, упрощение описания контура |
2 |
||||
|
3. |
Архитектура систем управления |
1,2,6 |
4, 5 |
МУ-1,2 МУ-4,6 ДЛ-5,7 |
КО, Экз. |
|
|
3.1 |
Поколения станков и систем ЧПУ. Общие сведения об устройствах ЧПУ, структурные схемы систем и компоновки станков с ЧПУ. |
4 |
|
1 |
2 |
3 |
4 |
4 |
6 |
7 |
|
3.2 |
Аппаратные решения блоков ввода-вывода, задания скорости, интерполяторов и их математическое обеспечение. Организация прохождения числа по функциональным блокам систем. |
8 |
||||
|
3.3 |
Реализация геометрических задач ЧПУ. Алгоритмы интерполяции: метод оценочных функций, покодовая интерполяция на постоянной несущей частоте, метод цифровых дифференциальных анализаторов, таблично-аналитические методы. |
4 |
||||
|
3.4 |
Операционные системы устройств ЧПУ. Особенности задач ЧПУ: взаимодействие и синхронность, реальное время, параллельность. Требования к операционной системе, структура, функции операционной системы. |
2 |
||||
|
4. |
Архитектура микропроцессорных систем управления |
7 |
5 |
МУ7 ДЛ-6,7 |
КО, Эк |
|
|
4.1 |
Устройство ЧПУ как виртуальная вычислительная Уровни математического обеспечения. |
4 |
||||
|
4.2 |
Группы позиций микропроцессорных устройств по функциональным возможностям. |
2 |
||||
|
4.3 |
Состав и назначение математического обеспечения микропроцессорных устройств ЧПУ. |
1 |
||||
|
5. |
Станочные комплексы и модули на базе станков с ЧПУ. |
7 |
МУ-7 ДЛ-7,8 МУ |
КО, Эк |
||
|
5.1 |
Структура и состав станочных комплексов. Уровни систем управления, технологическая подготовка производства. Организация транспортно-складской, инструментально-обслу-живающей и контрольно -измерительной систем. |
6 |
||||
|
5.2 |
Особенности построения систем управления нижнего уровня (ЧПУ станком, программи- руемые контроллеры) в комплексах и моду- лях. |
1 |
||||
|
5.3 |
Системы контроля инструмента. Погреш-ности обработки деталей взаимосвязь координат детали, инструмента и станка. |
2 |
||||
|
5.4 |
Организация связей станок-робот в гибких станочных комплексах и модулях. |
2 |
||||
|
5.5 |
Математическая модель гибкого про-изводственного модуля. Постановка перспективных задач развития |
1 |
3. УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ ДИСЦИПЛИНЫ
3.1.Лабораторные работы
|
Номер работы |
Наименование лабораторной работы |
Объем, час. |
|
1 |
Кинематическая настройка станка модели 9ФСП с программным управлением для работы по программе. |
4 |
|
2 |
Система управления автоматической сменой инструмента (АСИ) для станков токарной группы с ЧПУ. |
4 |
|
3 |
Разработка и контроль управляющих программ для систем ЧПУ мод. Н22, Н33-1м(2м) на УПДЛ |
4 |
|
4 |
Настройка вертикально-фрезерного станка с цикловой системой программного управления |
4 |
|
5 |
Наладка станка мод. 16К20ФЗС32 для работы по программе. |
8 |
|
6 |
Разработка управляющих программ для станка мод. 16К20ФЗС32 с системой 2Р22 |
6 |
3.2. Практические занятия
|
Номер занятия |
Тема практического занятия |
Объем, час. |
|
1 |
Методика записи управляющей информации для программоносителей системы ЧПУ Н22-1М (2М). Особенности записи геометрической, технологической и вспомогательной информации. |
4 |
|
2 |
Организация составления кадров, программы и последовательности вывода их на программоноситель. |
2 |
|
3 |
Методика записи управляющей информации для программоносителей системы ЧПУ Н33-1М (2М). Особенности записи геометрической, технологической и вспомогательной информации. |
4 |
|
4 |
Организация составления кадров, программы и последовательности вывода |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.