АДАПТИВНОЕ УПРАВЛЕНИЕ
МНОГОМЕРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ
С ПРОИЗВОЛЬНЫМИ ВОЗМУЩАЮЩИМИ ВОЗДЕЙСТВИЯМИ
Гольцов А. С., д.т.н., профессор Академии ФСО России
(г. Орел)
Априорная модель системы управления
Уравнение состояния объекта управления (ОУ):
|
|
(1) |
Математическая модель измерительного устройства:
|
|
(2) |
Множество допустимых управляющих воздействий:
|
|
(3) |
Требуемый закон изменения управляемой переменной:
|
|
(4) |
|
|
(5) |
где: ![]() - вектор переменных состояния ОУ;
- вектор переменных состояния ОУ; ![]() - вектор управляющих воздействий;
- вектор управляющих воздействий; ![]() -
вектор возмущающих воздействий на модель ОУ;
-
вектор возмущающих воздействий на модель ОУ; ![]() - вектор погрешностей задания начального
состояния ОУ;
- вектор погрешностей задания начального
состояния ОУ; ![]() – вектор выходных переменных измерительных
устройств;
– вектор выходных переменных измерительных
устройств; ![]() – вектор погрешностей измерений;
– вектор погрешностей измерений; ![]() -
предел допустимой погрешности j-го измерительного
устройства.
-
предел допустимой погрешности j-го измерительного
устройства.
Ограничения на управляемые переменные:
|
|
(4) |
|
|
(5) |
Критерий управления
|
|
(6) |
где: ![]() и
и ![]() - диагональные матрицы, составленные
из квадратов пределов допустимых погрешностей управления
- диагональные матрицы, составленные
из квадратов пределов допустимых погрешностей управления ![]() и
и ![]() соответственно;
соответственно;
![]() .
.
АЛГОРИТМ ОБУЧЕНИЯ МОДЕЛИ ОУ
Функция стоимости регуляризованного критерия МНК

 (2.1)
(2.1)
при
известных значениях вектора ![]() и аппроксимации
и аппроксимации ![]() В-сплайнами:
В-сплайнами:
|
|
(2.2) |
где ![]() -
параметр регуляризации (
-
параметр регуляризации (![]() ).
).
ПИ-регулятор оценок возмущающих воздействий
|
|
(2.3) |
|
|
(2.4) |
|
|
(2.5) |
|
|
(2.6) |
|
|
(2.7) |
Регуляризованная функция стоимости

|
|
(3.1) |
где:
|
|
(3.2) |
|
|
(3.3) |
|
|
(3.4) |
|
|
(3.5) |
Адаптивный ПИД-регулятор управляющих воздействий

|
|
(4.1) |
|
|
(4.2) |
с начальными условиями
|
|
(4.3) |
где:
|
|
(4.4) |
|
|
(4.5) |
|
|
(4.6) |
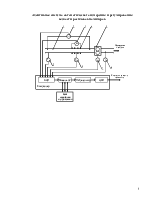
Схема адаптивной системы управления
Адаптивная система автоматического измерения и регулирования
вязкости расплавов полимеров
РЕЗУЛЬТАТЫ УПРАВЛЕНИЯМОЩНОСТЬЮ ТУТБОГЕНЕРАТОРА ТЭЦ
|
Рис. 1. Требуемый закон изменения мощности турбогенератора |
Рис. 2. Реализованный закон изменения мощности турбогенератора |
|
Рис. 3. Изменение во времени погрешности управления, % |
Рис. 4. Изменение во времени управляющего воздействия (положение заслонки клапана трубопровода подачи газа к горелкам |
СРАВНИТЕЛЬНЫЙ АНАЛИЗ СИСТЕМ УПРАВЛЕНИЯ АНТЕННОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА
Рис. 1.Схема штатной системы автосопровождения
СВСО - система выделения сигнала ошибки (радиоканал); НКЦ - наблюдатель координат цели; СУА - система управления приводом антенны; ДУС - датчик угловой скорости.
Рис. 2.Схема адаптивной САУ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




 ;
;  :
:  ;
;  ;
;  ,
, ;
;  ;
;  ;
;  ;
; ;
;  ;
;  ;
; ;
;  ;
;
 ;
;  ;
; ;
;  ;
;  ;
;
 ,
, ;
;  ;
; ;
; .
.