

Лабораторная работа №1
Исследование динамических характеристик типовых звеньев и их соединения.
Цель работы: Изучение переходных и частотных характеристик типовых динамических звеньев систем автоматического управления (САУ) и их соединений.
Исследование
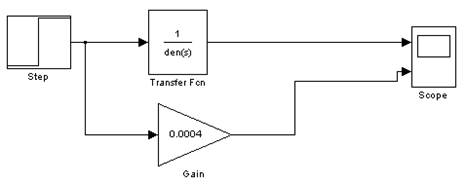
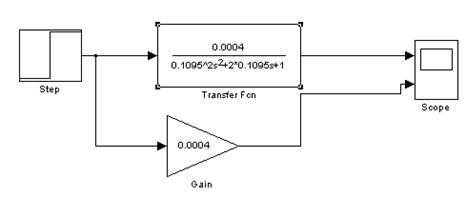
Модель колебательного звена
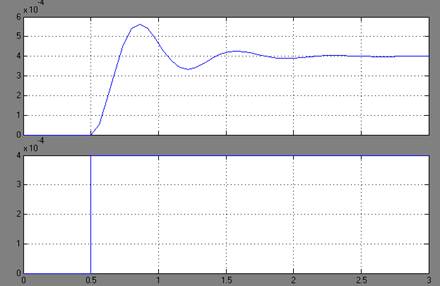
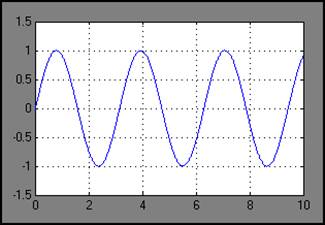
Переходный процесс
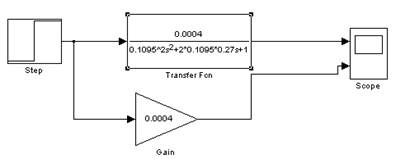
Модель колебательного звена (нормализованная форма).
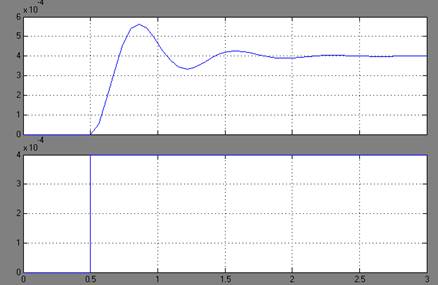
Переходный процесс (нормализованная форма).
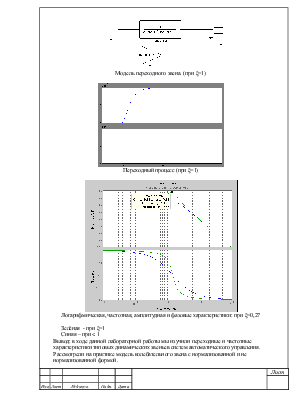
Модель переходного звена. (при ξ=1)
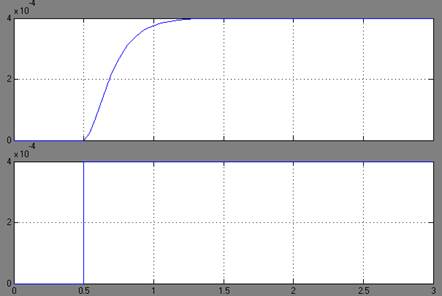
Переходный процесс (при ξ=1)
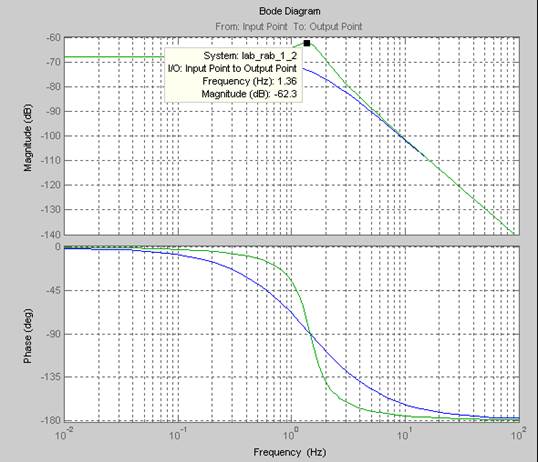
Логарифмическая, частотная, амплитудная и фазовые характеристики: при ξ=0,27
Зелёная - при ξ=1
Синяя – при < 1
Вывод: в ходе данной лабораторной работы мы изучили переходные и частотные характеристики типовых динамических звеньев систем автоматического управления. Рассмотрели на практике модель колебательного звена с нормализованной и не нормализованной формой.
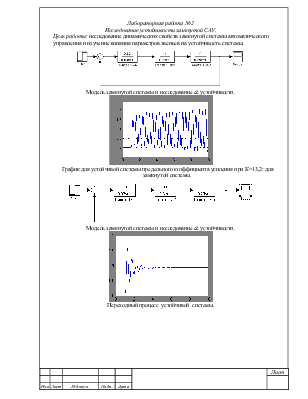
Лабораторная работа № 2
Исследование устойчивости замкнутой САУ.
Цель работы: исследование динамических свойств замкнутой системы автоматического управления и изучение влияния параметров звеньев на устойчивость системы.
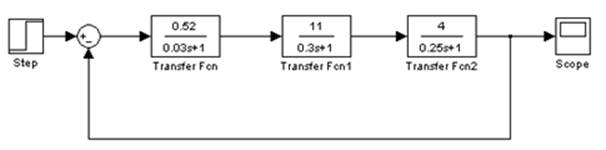
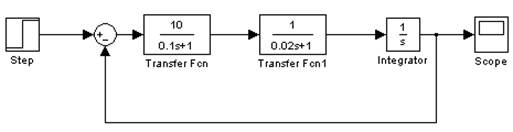
Модель замкнутой системы и исследование её устойчивости.
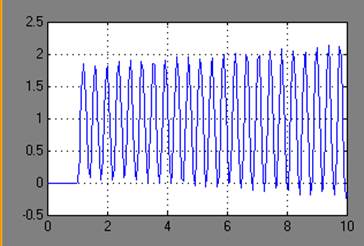
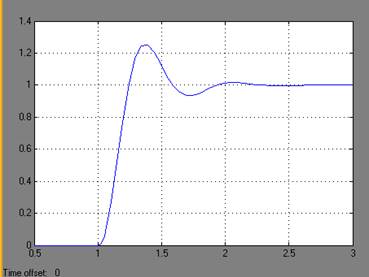
График для устойчивой системы предельного коэффициента усиления при К=13,2: для замкнутой системы.
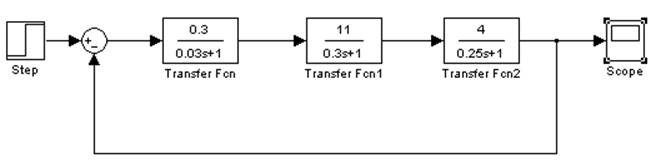
Модель замкнутой системы и исследование её устойчивости.
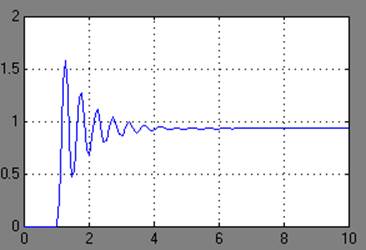
Переходный процесс устойчивой системы.
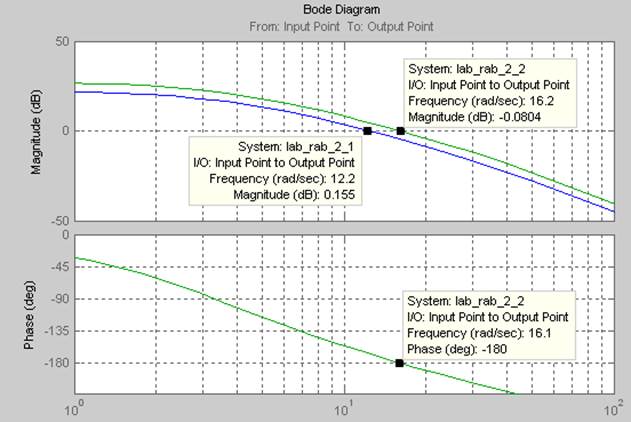
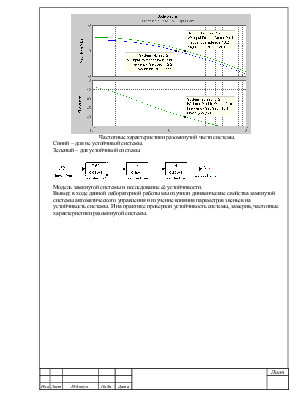
Частотные характеристики разомкнутой части системы.
Синий – для не устойчивой системы.
Зеленый – для устойчивой системы.

Модель замкнутой системы и исследование её устойчивости.
Вывод: в ходе данной лабораторной работы мы изучили динамические свойства замкнутой системы автоматического управления и изучение влияния параметров звеньев на устойчивость системы. И на практике проверили устойчивость системы, замерив, частотные характеристики разомкнутой системы.
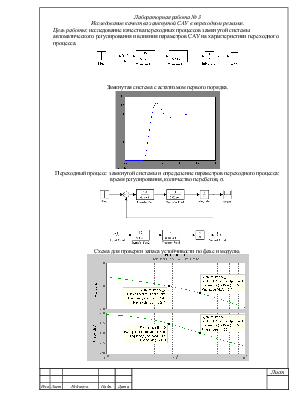
Лабораторная работа № 3
Исследование качества замкнутой САУ в переходном режиме.
Цель работы: исследование качества переходных процессов замкнутой системы автоматического регулирования и влияния параметров САУ на характеристики переходного процесса.
Замкнутая система с астатизмом первого порядка.
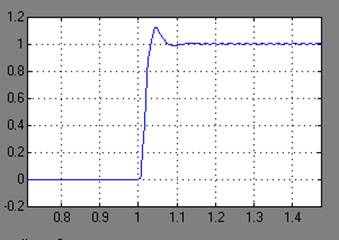
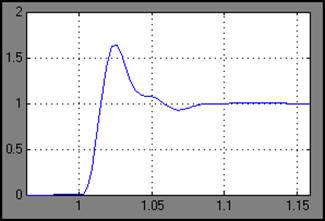
Переходный процесс замкнутой системы и определение параметров переходного процесса: время регулирования, количество перебегов, σ.
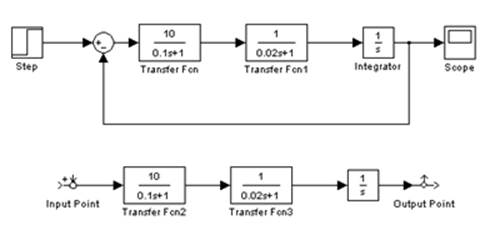
Схема для проверки запаса устойчивости по фазе и модулю.
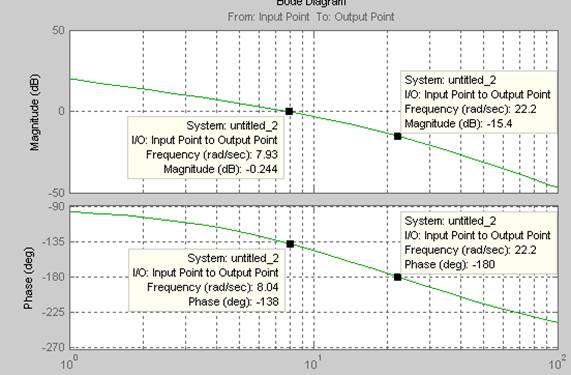
Определение запаса устойчивости по фазе и по модулю:
По модулю: 15,4
По фазе: 42
Вывод: В лабораторной работе определены количественные показатели качества замкнутой системы со статизмом первого порядка. По переходному процессу определено значение перерегулирования по переходному процессу: значение перерегулирования, времени регулирования, количества перебегов. По частотной характеристики разомкнутой части системы определены запас устойчивости по фазе и запас устойчивости по модулю. Все показатели находятся в допустимых пределах.
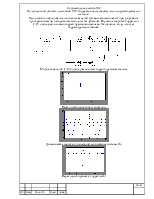
Лабораторная работа №4
Исследование точности замкнутой САР. Коррекция последовательными корректирующими звеньями.
Цель работы: исследование точности замкнутой системы автоматического регулирования при гармоническом и скоростном выходных воздействиях. Изучение вопросов коррекции САУ последовательными корректирующими звеньями. Назначение, виды и синтез корректирующих звеньев.
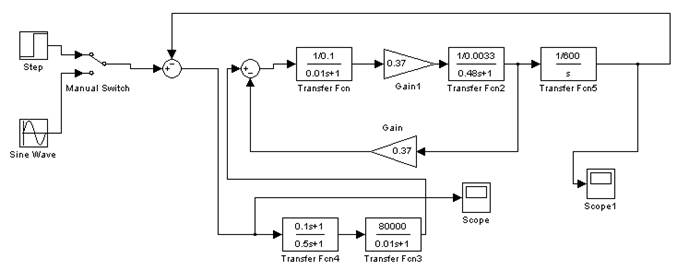
Модель замкнутой САУ с последовательным корректирующим звеном.
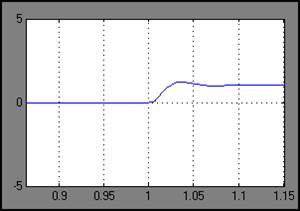
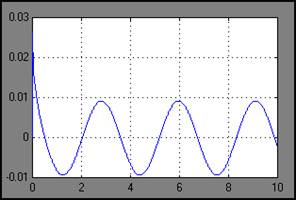
Переходный процесс без коррекции.
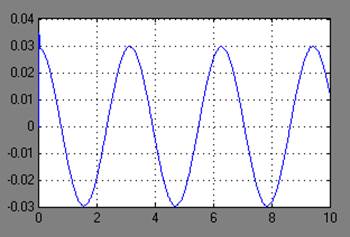
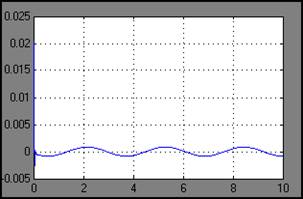
Динамическая ошибка, с погрешностью слежения системы 3%
Переходный процесс с коррекцией.
Динамическая ошибка, с погрешностью слежения системы < 1%
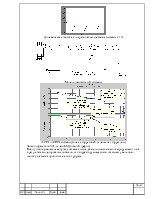
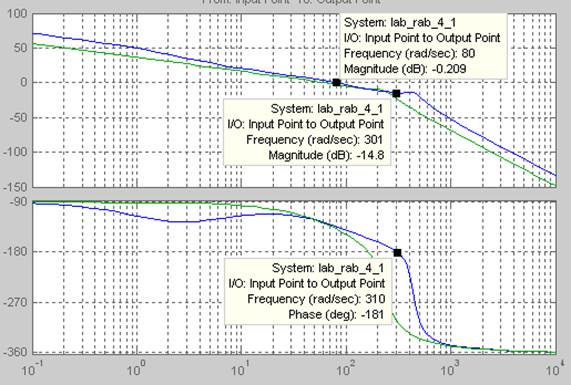
Модель разомкнутой системы.
ЛАЧХ и ЛФЧХ системы(синяя с коррекцией, зелёная без коррекции )
Запас по фазе синий 51, зелёной 60(нижний график)
Вывод: исследовалась замкнутая система с последовательным звеном интегрирующего типа, в результате моделирования показано, что корректирующее звено позволяет уменьшить ошибку слежения приблизительно в три раза.
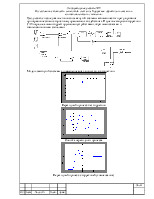
Лабораторная работа №5
Исследование точности замкнутой системы. Коррекция обратными связями и компенсационными сигналами.
Цель работы: исследование точности замкнутой системы автоматического регулирования при гармоническом и скоростном управляющих воздействиях. Изучение вопросов коррекции САУ параллельными корректирующими устройствами, обратными связями и компенсационными сигналами.
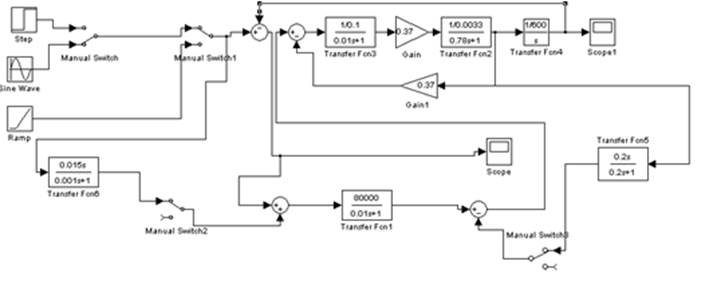
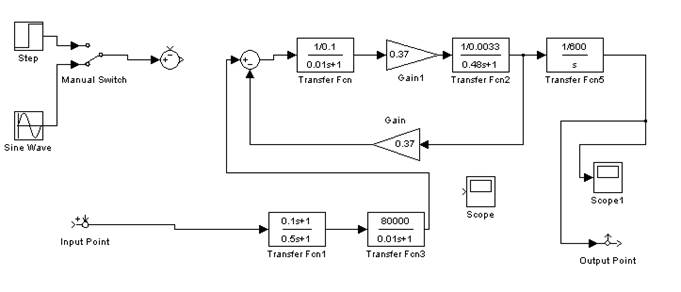
Модель замкнутой системы с применением различных видов коррекции.
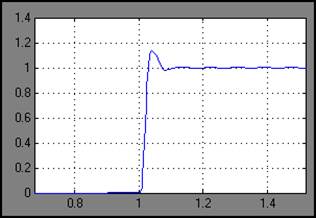
Переходный процесс без коррекции
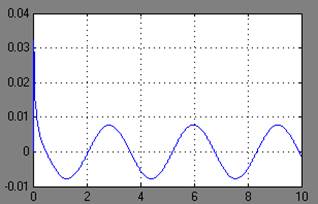
Ошибка переходного процесса
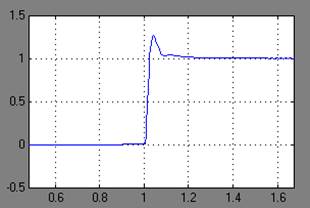
Переходный процесс с коррекцией (компенсация)
Ошибка переходного процесса с коррекцией (компенсация)
Переходный процесс с коррекцией (обратная связь)
Ошибка переходного процесса с коррекцией (обратная коррекция)
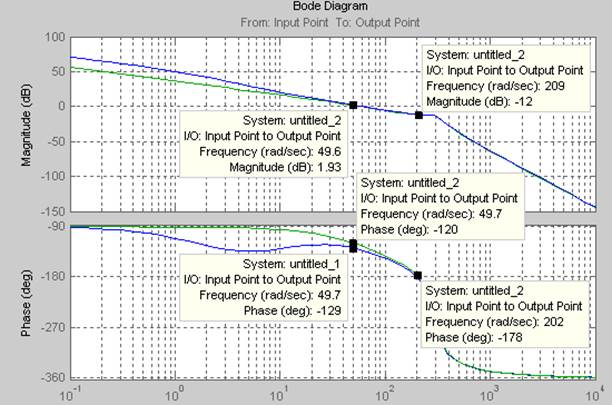
Частотная характеристика.
Зелёный – без коррекции
Синий – с коррекцией
Вывод: исследована замкнутая система с двумя видами коррекции, 1 местная отрицательная обратная связь, 2 компенсация скоростной составляющей ошибки. В первом случае ошибка уменьшилась в 3 раза, во втором случае ошибка уменьшилась ещё больше примерно в 30 раз.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.