|
|
Тепловые деформации |
||||||
|
|
Динамические деформации, вибрации |
||||||
|
|
Статическая деформация под изменяющейся нагрузкой |
||||||
|
|
|||||||
|
|
Позиционный разброс |
||||||
|
|
Погрешность датчика позициони- рования |
Погреш- ности позициони- рования |
|||||
|
|
Систематическая погрешность позициони- рования- |
||||||
|
|
|||||||
|
Геометрические неточности |
|||||||
|
Статические деформации под постоянной нагрузкой |
Рис.11.1. Структура
погрешностей станка с ЧПУ
2. Случайную погрешность в виде позиционного разброса, обусловленную
неодинаковым позиционированием рабочего органа при его нескольких повторяющихся
выходах в одну и ту же заданную программой координату.
В целом погрешность позиционирования представляет собой суммарную накопленную погрешность приводов станка.
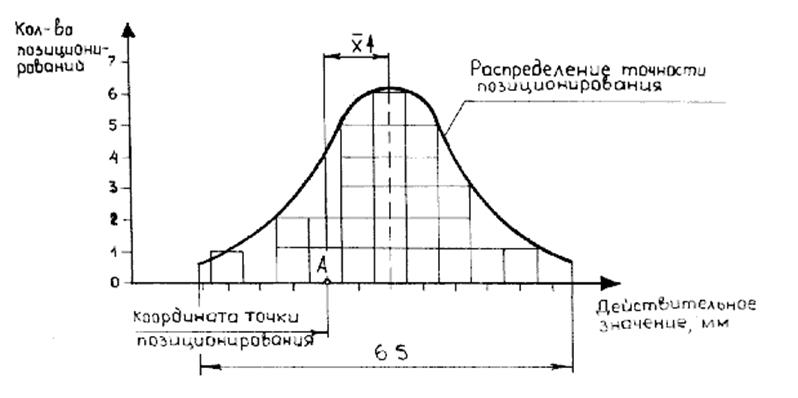
Наличие погрешности позиционирования приводит к тому, что при нескольких последовательно осуществляемых в одном и том же координатном направлении (например положительном) позиционированиях рабочего органа в произвольной точке А он может занять любое положение в пределах 6S (рис. 11.2).
Средняя погрешность позиционирования определяется как среднее арифметическое погрешностей Xi по n позиционированиям:
 .
.
Разброс погрешности (рассеивание) определяется среднеквадратичным отклонением:
 .
.
Если
рабочий орган будет приближаться (двигаться) к точке позиционирования с другой
стороны (в отрицательном направлении - «![]() »), то соответствующая этому
направлению движения кривая распределения погрешности позиционирования будет
смещена относительно первой кривой, как показано на рис. 11.3.
»), то соответствующая этому
направлению движения кривая распределения погрешности позиционирования будет
смещена относительно первой кривой, как показано на рис. 11.3.
Величина смещения кривых распределения характеризуется так называемым реверсивным валом:
![]() .
.
Систематическая погрешность позиционирования при движении в противоположных направлениях равна:
 .
.
|
|
Рис. 11.2. Точность позиционирования при движении рабочего органа
в одном направлении.
|
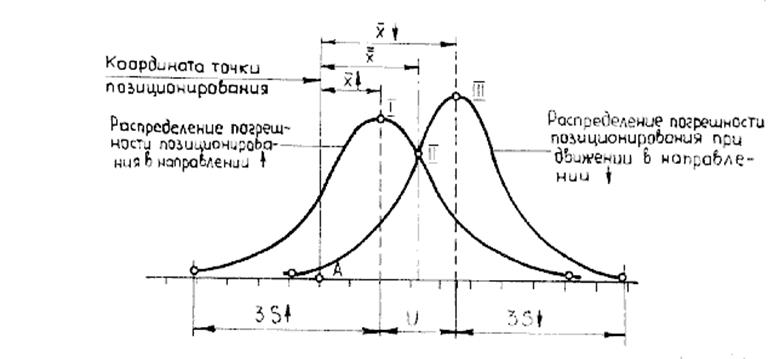
Рис. 11.3. Точность позиционирования при движении рабочего органа в противоположных направлениях. |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.