Аналогично с единичной ступенчатой функцией, для d-функции можно ввести запаздывание
Если имеются периодические импульсы (как на рис.6), то можно предположить, что амплитуда импульса (A) в течение времени его действия не меняется и импульс, приходящийся на момент t0 можно описать с помощью выражения Ad(t-t0) D.
Если t0=nT (n=0,1,2…) , то
F(t)=A[d(t)+ d(t-t)+d(t-2T)+…] D
Далее, если величина A меняется от импульса к импульсу согласно зависимости A = f(t),.
То импульсный сигнал может быть описан через формулу
F(t)=f(t)[d(t)+ d(t-t)+…] D
Если D<<T, то имеем дискретную форму функции:
F(t)=f[nT] ,(n=0,1,2…),
которую называют также решетчатой функцией f[n].
Аналогично непрерывной единичной ступенчатой функции можно ввести решетчатую единичную ступенчатую функцию и представить дискретный сигнал как произведение единичной ступенчатой решетчатой функции и описывающей функции:
x[n]=f(t)1[n]
Часто решетчатая функция
является результатом некоторого другого воздействия на систему и дискретизации
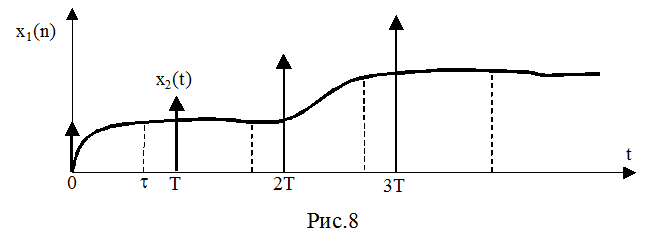
внутри нее. Таким образом, время дискретизации сигнала на выходе объекта x2(t)
будет смещено относительно времени дискретизации входного сигнала x1(t)
на некоторую постоянную величину t. В этом случае имеем смещенную решетчатую функцию
с относительным временем запаздывания 
![]()
Изменяя величину e, можно получать реакцию непрерывного объекта на дискретный сигнал в любой момент времени (рис.8).
Таким образом мы изучили два типа воздействий (которые могут быть управляющими или возмущающими) – дискретные и непрерывные. Оба они предполагаются детерминированными. Это означает, что описывающие функции f(t) или f[n] этих воздействий всегда можно выразить через точные формулы. Типы описывающих функций могут быть совершенно различными – гармонические, линейно меняющиеся, постоянные, экспоненциальные и др. Системы , в которых все воздействия (сигналы) являются детерминированными, также называются детерминированными.
Однако, в природе и в технике гораздо чаще встречаются стохастические системы. В них один, два или более сигналов носят случайный характер. Чаще всего случайными являются возмущающие воздействия, однако шумы случайного характера могут также присутствовать и в сигналах управления. Для стохастического (случайного) сигнала каждая его реализация (при одних и тех же внешних условиях) будет отличаться от предыдущей. Таким образом, нельзя узнать точное значение стохастического сигнала до его реализации. В детерминированных системах наоборот, всегда можно предсказать точное значение сигнала при заданных внешних условиях и параметрах системы. Для случайных сигналов x(t) или x[n] можно определить только вероятностные характеристики , такие как плотность вероятности. Пусть F(y) – интегральная плотность распределения.
F(y)=P{x<y}
где P{x<y} – вероятность того, что x(t) меньше, чем y.
Если для F(y) существует непрерывная функция w(x) – плотность вероятности, то верно соотношение:
 ,
,
где x - непрерывная случайная величина.
Плотность вероятности называют также дифференциальной плотностью распределения, так как:
![]()
Дискретную
случайную величину ![]() , которая принимает случайные
значения y1,y2..yn… с вероятностью P1,
P2..Pn… (при условии
, которая принимает случайные
значения y1,y2..yn… с вероятностью P1,
P2..Pn… (при условии  ) также
можно описать через функцию плотности вероятности:
) также
можно описать через функцию плотности вероятности:
 .
.
Важнейшей характеристикой случайной величины является ее математическое ожидание. Для непрерывной величины она выражается формулой:
 ,
,
для дискретного сигнала:
Математическое
ожидание среднеквадратичного отклонения от ![]() называется
дисперсией:
называется
дисперсией:

Для решетчатой функции:
![]()
Математическое ожидание произведения двух сигналов, один их которых смещен во времени называется взаимной корреляционной функцией.
Для одного сигнала со смещением по времени вводится понятие автокорреляционной функции:
Случайный сигнал считается стационарным, если его автокорреляционная функция не зависит от времени. Стационарные сигналы не затухают и не возрастают неограниченно во времени.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.