либо простым делением числителя на знаменатель передаточной функции ошибки, так как она представляет собой рациональную дробь.
Например, если передаточную функцию представить в виде
то коэффициенты ошибок определяются так
 .
.
Коэффициент
c0≠0 только для статических систем. Для систем с астатизмом первого
порядка c0=0;  ; для систем с
астатизмом второго порядка c0=0; c1=1;
; для систем с
астатизмом второго порядка c0=0; c1=1;  и т.д.
и т.д.
Пример:
Пусть передаточная функция разомкнутой системы имеет вид:
 .
.
Передаточная функция замкнутой системы по ошибке:



Если управляющее воздействие будет иметь вид:
 ,
,
то установившаяся ошибка будет определяться формулой:
 .
.
Качество
процесса управления в системе можно оценить, используя переходную
характеристику. Как известно, основными параметрами этой характеристики
являются величина перерегулирования ![]() и
время регулирования (tc)
(рис. 2)
и
время регулирования (tc)
(рис. 2)
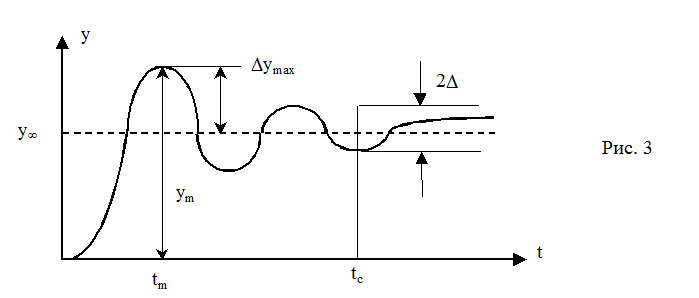
Допустимая величина σ определяется индивидуально для каждой системы в соответствии с ее назначением и условиями функционирования. Обычно полагают в качестве хорошего значения величину σ =10..30%.
Быстродействие системы можно оценить по величине времени tc. Переходный процесс считается законченным, если выходная величина системы удовлетворяет условию
![]()
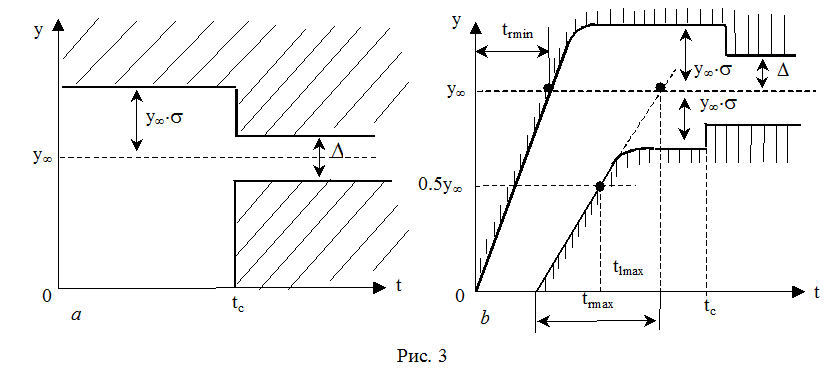
где Δ - заданное малое значение установившейся ошибки. В соответствии с приведенными двумя параметрами, переходный процесс можно считать качественным, если он лежит внутри разрешенной зоны (рис. 3а).
Дальнейшее развитие данных критериев качества ведет к появлению дополнительных ограничений на следующие величины:
1) время нарастания (tr) – время между пересечением оси времени и касательной к осредненной кривой переходного процесса и пересечением прямой линии y∞ и указанной касательной переходного процесса
2) время запаздывания(tL) - время между моментом приложения скачкообразного воздействия и достижением осредненной величиной выходной координаты половины установившегося значения y∞.
В соответствии с заданными величинами trmin, trmax, tLmax допустимая область расположения переходной характеристики приобретает более сложную форму (рис.3b).
Зная вид переходной характеристики, иногда более полезно применить интегральную оценку качества процесса регулирования. Простейший вид такой оценки – это интеграл ошибки в переходном процессе (рис. 4а)
Величина I1 конечна, если ![]() .
.
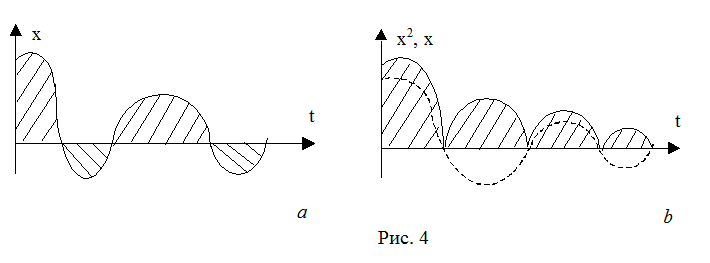
Величина I1 не очень удобна для колебательных процессов, так как положительные и отрицательные полуволны взаимно уничтожаются в ней. Поэтому применяют другие виды интегральных оценок. (рис.4b).
 ;
;
 .
.
Во всех случаях для улучшения качества переходного процесса следует минимизировать величину интегральной оценки.
Для того, чтобы использовать критерий качества, связанный с переходной характеристикой системы, необходимо получить эту характеристику. Сейчас для этого обычно используют численные методы моделирования линейных или нелинейных систем на компьютерах. Однако эти вычисления часто требуют больших затрат времени, и для более быстрой оценки качества используют частотные критерии и оценки. Из них наиболее часто используют величины запасов устойчивости по амплитуде и по фазе, так как с ними тесно связана величина перерегулирования.
Для
амплитудно-фазовой характеристики системы (рис.5) можно указать запас
устойчивости по фазе![]() и
два запаса устойчивости по амплитуде
и
два запаса устойчивости по амплитуде .
.
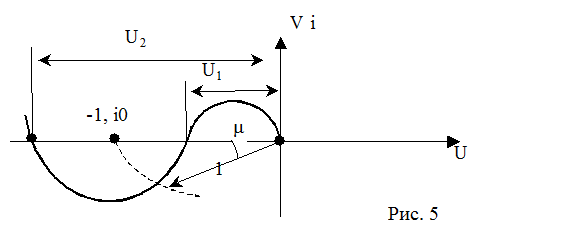
В хорошо демпфированной системе обычно соблюдаются условия
Более удобно оценивать качество системы не по двум DL и Dm , а по одному параметру , который
называют показателем колебательности. Его величин равна максимальному
значению амплитуды частотной характеристики![]() ..
..
Если входной сигнал гармонический![]() , то в линейной
системе и выходной сигнал также имеет гармонический характер
, то в линейной
системе и выходной сигнал также имеет гармонический характер![]() , и тогда
, и тогда
Показатель колебательности равен:  (2)
(2)
Для хорошо демпфированной системы M=1,1….1,5,
но иногда допускаются и величины ![]() .
.
В соответствии с выражением (2) можно записать:
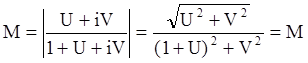
![]() (3)
(3)
где 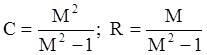
Выражение (3) представляет собой уравнение окружности
с радиусом R и центром, смещенным из начала координат на величину С вдоль
действительной оси. Для того, чтобы получить замкнутую систему с показателем
колебательности ![]() , необходимо, чтобы частотная
характеристика разомкнутой системы W(iω). располагалась бы вне окружности,
определенной для данного
, необходимо, чтобы частотная
характеристика разомкнутой системы W(iω). располагалась бы вне окружности,
определенной для данного ![]() (рис. 6).
(рис. 6).
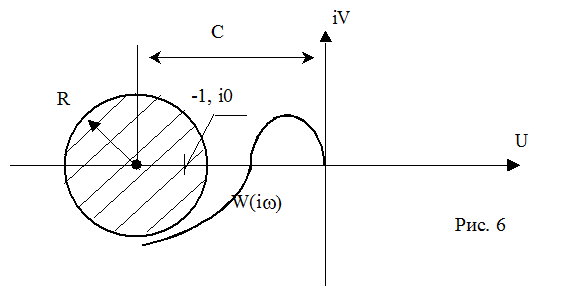
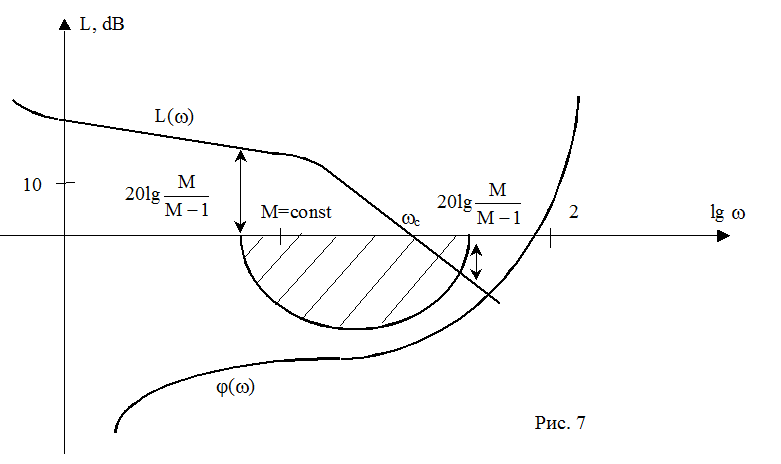
Указанная окружность фвляется запрещенной зоной для характеристики W(iω). Таким же образом можно получить и запрещенную зону для логариямической фазочастотной характеристики (рис. 7).
Для определения быстродействия системы по частотной
характеристике можно применить оценку по следующим величинам: 1) ![]() - – частота среза (там, где A(
- – частота среза (там, где A(![]() )=1); 2)
)=1); 2) ![]() - -
частота пропускания: определяется для A(
- -
частота пропускания: определяется для A(![]() )=0,707 (-3dB) (важна для замкнутой системы). Эти показатели определяются
в соответствии с индивидуальными требованиями к системе. Они показывают
способность системы отрабатывать сигналы в заданном диапазоне частот.
)=0,707 (-3dB) (важна для замкнутой системы). Эти показатели определяются
в соответствии с индивидуальными требованиями к системе. Они показывают
способность системы отрабатывать сигналы в заданном диапазоне частот.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.