
















белорусский государственный
университет транспорта
«Разработка
микропроцессорной
управляющей системы»
|
Выполнила группы ЭМ-41 Новик С.Н. |
Проверил Харлап С.Н. |
1999
СОДЕРЖАНИЕ
Введение............................................................................................... 3
1 техническое задание..................................................................... 4
1.1 Описание системы............................................................................................................................... 4
1.2 Алгоритм работы системы................................................................................................................ 5
1.3 Обработка запросов на прерывания.............................................................................................. 8
2 Реализация системы..................................................................... 9
2.1 Описание блоков функциональной схемы................................................................................. 9
2.2 Реализация алгоритма работы...................................................................................................... 10
3 ОЦЕНКА МПС...................................................................................... 14
ЗАКЛЮЧЕНИЕ........................................................................................ 16
Литература.......................................................................................... 17
ПРИЛОЖЕНИЕ 1 спецификация элементов.................................. 18
приложение 2 принципиальная схема подсистемы............. 21
Целью курсового проекта является разработка безопасной микропроцессорной системы управления объектом с использованием принципа принятия решения о правильности выдаваемых управляющих воздействий методом голосования.
Микропроцессорная система принимает информацию об объекте от аналоговых датчиков, вырабатывает в соответствии с законом управления управляющие воздействия и подает их на исполнительные механизмы. Микропроцессорная система состоит из трёх микроконтроллеров, схемы принятия решения о правильности выдаваемых управляющих воздействий и пульта управления, с помощью которого оператор имеет возможность управлять работой микроЭВМ: запускать ее, останавливать, а также фиксировать наличие сбоев с подсистемах разрабатываемой МПС.
В курсовом проекте разрабатывается функциональная и принципиальная схемы МПС и программа, обеспечивающая выполнение алгоритма управления.
Необходимо разработать микропроцессорную систему (МПС) управления некоторым объектом. МПС принимает информацию об объекте управления от аналоговых и цифровых датчиков, вырабатывает управляющие воздействия в соответствии с законом управления и подаёт их на исполнительные механизмы.
Для обеспечения надёжной работы МПС, её необходимо выполнить с использованием мажоритарного принципа. Выходные сигналы МПС определяются методом голосования. При сбое в какой-либо подсистеме необходимо остановить работу этой системы, обеспечить индикацию ошибки на пульте оператора и защитные значения управляющих сигналов на выходе этой подсистемы. Оставшиеся в рабочем состоянии системы должны продолжать функционирование. При сбое в работе мажорирующего устройства (МУ) МПС должна перейти в защитное состояние (выставить на управляющих выходах нулевые уровни сигналов).
Для повышения надёжности системы помимо аппаратных способов необходимо использовать также и программные методы для определения сбоев в программном обеспечении (ПО). Наиболее простым методом является реализация информационной избыточности путём подсчёта контрольной суммы кода программы.
Алгоритмы работы всех модулей, входящих в систему, идентичны и в общем виде могут быть представлены блок-схемой, приведённой на рис.1.
Блок 2 выполняет начальную установку системы: настройку программируемых БИС (параллельных и последовательного периферийных адаптеров, контроллера прерываний, таймера).
Блок 3 осуществляет подсчёт контрольной суммы кода программы и в случае обнаружения ошибки сигнализирует об этом оператору.
Блок 4 принимает информацию от двоичных датчиков Х1, X2, X3
и вычисляет значение булевой функции f(X1,X2,X3) в соответствии с заданным
выражением. Вид функции: ![]() . Программная
реализация функции выполнена методом адресных переходов.
. Программная
реализация функции выполнена методом адресных переходов.
Блок 5 обеспечивает прием информации с аналоговых датчиков
V1,V2, V3, ее преобразование в цифровую форму, вычисление значений управляющих
воздействий Y2, Y3, Y4 и выдачу их на ИМ. При этом Y2 и Y3 являются двоичными
сигналами, а Y4 - восьмиразрядным кодом, преобразуемым в аналоговый сигнал V4.
При выполнении этой функции оператор с пульта управления может задавать
значение кода уставки. Необходимо реализовать функцию ![]() ,
где К – код уставки. Результат полученной функции сравнивается с константой Q,
хранящейся в ПЗУ. В зависимости от результат сравнения МПС вырабатывает
двоичные управляющие воздействия Y2 или Y3 длительностью 40 мкс. Значение
функции Y4:
,
где К – код уставки. Результат полученной функции сравнивается с константой Q,
хранящейся в ПЗУ. В зависимости от результат сравнения МПС вырабатывает
двоичные управляющие воздействия Y2 или Y3 длительностью 40 мкс. Значение
функции Y4: ![]() , где a0 и a1 – некоторые константы, хранящиеся
в ПЗУ.
, где a0 и a1 – некоторые константы, хранящиеся
в ПЗУ.
Блок 6 осуществляет выдачу управляющих воздействий на МУ в соответствии с вычисленными значениями. При единичном значении функции f() он вырабатывает выходной сигнал Y1 длительностью 40 мкс.
Блок 7 обеспечивает циклический режим управления или останов МПС в соответствии с командой, поступающей от оператора с пульта. В системе имеется также двоичный датчик аварийной ситуации X0, единичный сигнал с которого должен вызвать аварийный останов системы в любой момент выполнения рабочего цикла программы.

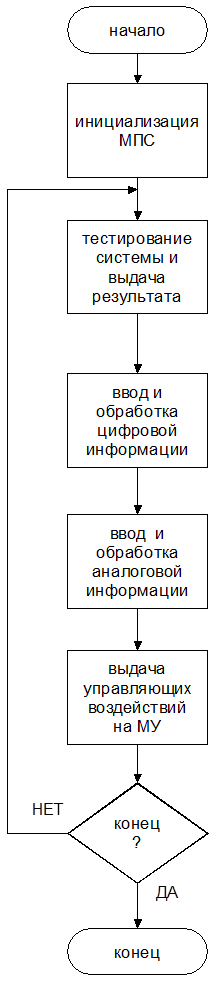
Рисунок 1. Алгоритм работы модуля МПС
Необходимо обеспечить обработку следующих запросов на прерывания:
- запрос на прерывание по сигналу отказа источника питания INT0;
- запрос на прерывание от терминала внешней ЭВМ INT2;
Прерывание работы МПС при отказе источника питания имеет высший приоритет. МПС при этом передает в последовательный канал связи код символа «!». После выполнения указанных действий МПС останавливается.
Прерывания от терминала внешней ЭВМ осуществляются при приеме последовательным каналом связи символа управления обменом. Приемник БИС последовательного адаптера выставляет при этом запрос на прерывание работы основной программы МПС с целью передачи в последовательный канал связи запрашиваемой информации. Запрашиваемая информации формируется в зависимости от принятого из канала символа. При приеме символа «D» в канал передается значение Y1, при приеме символа «А» - значение Y4. После загрузки в буфер передатчика БИС последовательного адаптера запрашиваемой информации управление передается в прерванную программу.
Функциональная схема одного модуля МПС приведена на рис.2. Каждый модуль системы содержит блок центрального процессора, 2 программируемых периферийных адаптера (ППА), программируемый связной адаптер (ПСА), контроллер приоритета прерываний (КПП), программируемый интервальный таймер (ПИТ), сдвиговый регистр, мультиплексор, блок аналого-цифрового преобразователя, и коммутаторы. Помимо этого микропроцессорная система содержит 5 мажоритарных устройств, сдвиговый регистр, демультиплексор и пульт управления.
ППА1 предназначен для ввода информации от объекта управления. Посредством его производится чтение аналоговых и цифровых сигналов, а также управление коммутирующими устройствами в блоке аналого-цифрового преобразования. В каждом цикле программы осуществляется подсчёт контрольной суммы кода программы. В случае наличия ошибки на бите №3 порта С ППА1 устанавливается признак ошибки (логическая единица
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.