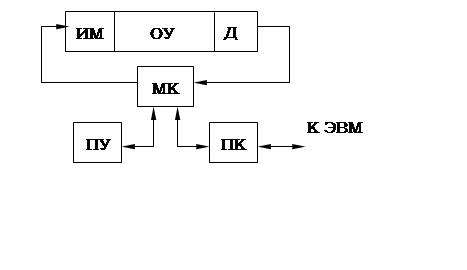
С помощью последовательного канала (ПК) связи МПС может передавать обработанную информацию ЭВМ более высокого уровня по ее запросу.
 |
В данном курсовом проекте разработана структурная схема МПС, включая устройства связи с датчиками и исполнительным механизмом, и приведены программы, обеспечивающие выполнение алгоритма управления и алгоритма обмена, осуществлена оценка характеристик МПС.
В курсовом проекте произведен расчет числа аппаратурных затрат, выраженных в числе условных корпусов. Кроме того, рассчитаны минимальное время выполнения рабочего цикла программы и необходимые информационные емкости оперативной и постоянной памяти.
В качестве элементной базы ядра МПС взят микропроцессорный комплект серии КР580.
функция для обработки цифровой информации:
Y1= ![]()
функция для обработки аналоговой информации
N = max(N1-K;N2)
 |
Блок 2 выполняет начальную установку системы: настройку программируемых БИС (параллельных и последовательного периферийных адаптеров, контроллера прерываний, таймера), засылку в выходные каналы начальных значений управляющих воздействий.
Блок 3 реализует задачу логического управления: принимает информацию от двоичных датчиков Х1, X2, X3, Х4, Х5 вычисляет значение булевой функции f(X1, X2, X3, Х4, Х5) в соответствии с заданным выражением и выдает это значение в качестве управляющего сигнала (УС) Y1 по соответствующему выходному каналу на ИМ.
Блок 4 обеспечивает прием информации с аналоговых датчиков V1, V2, V3, ее преобразование в цифровую форму, вычисление значений управляющих воздействий Y2, Y3, Y4 и выдачу их на ИМ. При этом Y2 и Y3 являются двоичными сигналами, а Y4 - восьмиразрядным кодом, преобразуемым в аналоговый сигнал V4. При выполнении этой функции оператор с ПУ может задавать значение константы К.
Блок 5 обеспечивает циклический режим управления или останов МПС в соответствии с командой, поступающей от оператора с ПУ. В системе имеется также двоичный датчик аварийной ситуации X0, единичный сигнал с которого вызывает аварийный останов системы в любой момент выполнения рабочего цикла программы.
МПС
опрашивает двоичные датчики X1,X2,X3,X4, Х5 и вычисляет булеву функцию Y1= ![]() . При единичном значении функции МПС
вырабатывает выходной сигнал Y1=1 длительностью 40 мкс. Это означает, что через
40 мкс после выдачи единичного сигнала Y1 вырабатывается нулевой сигнал Y1.
. При единичном значении функции МПС
вырабатывает выходной сигнал Y1=1 длительностью 40 мкс. Это означает, что через
40 мкс после выдачи единичного сигнала Y1 вырабатывается нулевой сигнал Y1.
Таблица 1 – Таблица истинности логической функции
|
X1 |
X2 |
X3 |
X4 |
X5 |
Y1= |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
1 |
0 |
|
0 |
0 |
0 |
1 |
0 |
0 |
|
0 |
0 |
0 |
1 |
1 |
1 |
|
0 |
0 |
1 |
0 |
0 |
0 |
|
0 |
0 |
1 |
0 |
1 |
0 |
|
0 |
0 |
1 |
1 |
1 |
0 |
|
0 |
1 |
0 |
0 |
0 |
0 |
|
0 |
1 |
0 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
0 |
0 |
|
0 |
1 |
0 |
1 |
1 |
1 |
|
0 |
1 |
1 |
0 |
0 |
0 |
|
0 |
1 |
1 |
0 |
1 |
0 |
|
0 |
1 |
1 |
1 |
0 |
0 |
|
0 |
1 |
1 |
1 |
1 |
0 |
|
1 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
1 |
0 |
|
1 |
0 |
0 |
1 |
0 |
0 |
|
1 |
0 |
0 |
1 |
1 |
1 |
|
1 |
0 |
1 |
0 |
0 |
0 |
|
1 |
0 |
1 |
0 |
1 |
0 |
|
1 |
0 |
1 |
1 |
0 |
0 |
|
1 |
0 |
1 |
1 |
1 |
0 |
|
1 |
1 |
0 |
0 |
0 |
1 |
|
1 |
1 |
0 |
0 |
1 |
1 |
|
1 |
1 |
0 |
1 |
0 |
1 |
|
1 |
1 |
0 |
1 |
1 |
1 |
|
1 |
1 |
1 |
0 |
0 |
1 |
|
1 |
1 |
1 |
0 |
1 |
1 |
|
1 |
1 |
1 |
1 |
0 |
1 |
|
1 |
1 |
1 |
1 |
1 |
1 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.