2.5 Разработка пульта управления
Пульт управления должен совмещать в себе все необходимые сигналы и органы управления для полного контроля работы МПС. Выведем на пульт управления следующие сигналы:
· Сигнал об аварии (рассогласование работы каналов, отключение питания)
· Входные сигналы X1,X2,X3,X4
· Выходные сигналы Y1,Y2,Y3,Y4
· Сигнал с АЦП N
На пульт так же следует вывести следующие органы управления:
· Кнопка «Оператор»
· Кнопка включения/отключения питания
· Тумблеры формирования байта К
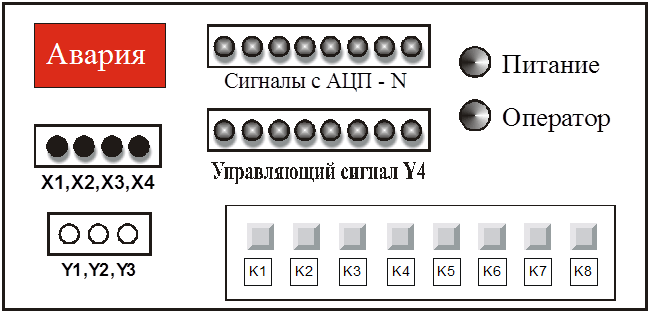 |
Рисунок 8 - Внешний вид пульта
В качестве тумблеров я выбрал перекидные переключатели ПТ8-1, предназначенный для коммутации цепей с напряжением от 10-3 до 70 В и имеющих сопротивление замкнутых контактов 0,02 Ом.. А в качестве кнопок – кнопочные переключатели ПКнЧ-1Т, рассчитанные на коммутацию напряжений от 10-3 до 36 В
3 Разработка программного обеспечения
3.1 Алгоритмы работы программы и
вспомогательных подпрограмм
Программное обеспечение микропроцессорной системы должно обеспечивать выполнение всех предусмотренных заданием операций управления, обработки данных.
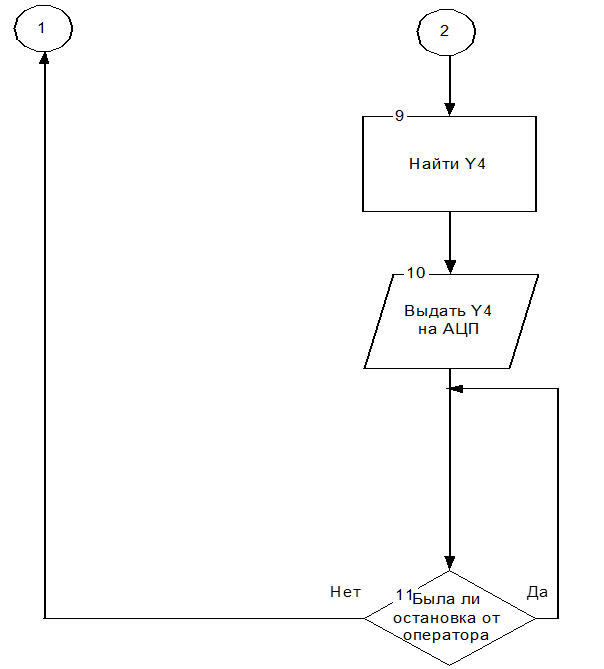
Алгоритм основной программы представлен на рисунке 9 и рисунке 10. Основная программа выполняет все необходимые действия, связанные со считыванием значений входных датчиков, обработкой полученных значений и выдачей результатов на исполнительный механизм. Алгоритм подпрограммы обработки прерывания по сигналу от пульта управления представлен на рисунке 11. Прерывания по сигналу отказа источника питания реализовано аппаратно. Обслуживание прерывания по сигналу оператора заключается в рестарте программ каналов. По сигналу аварийного датчика происходит остановка программы и выдача в линию сигнала «!» (в это время происходит включение аварийной сигнализации на пульте управления), а так же обнуление всех выходов вычислительного канала (рисунок 12).
 |
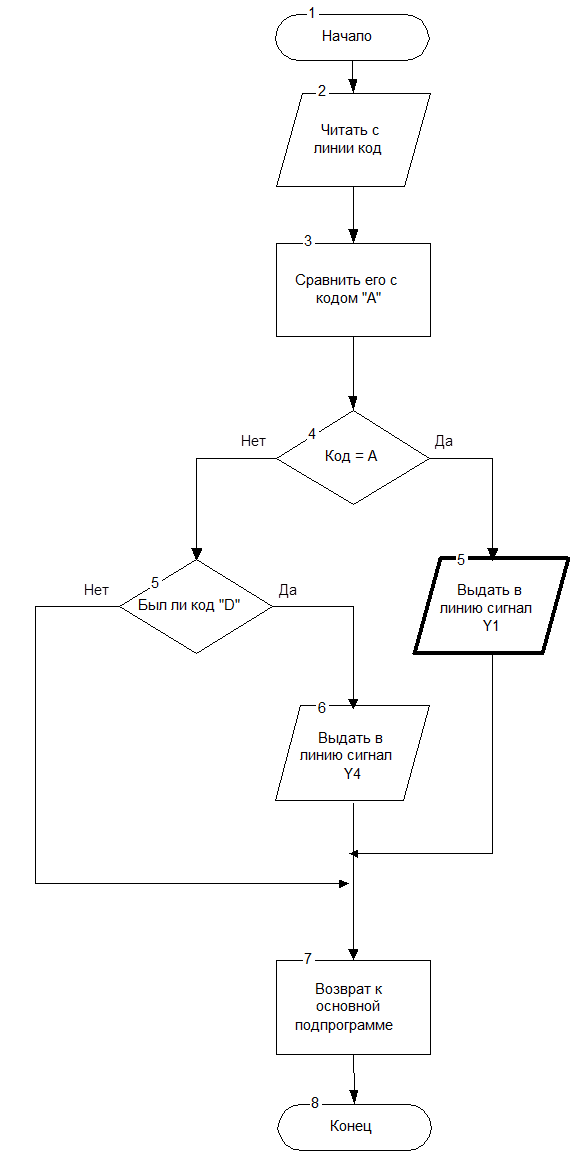 |
Рисунок 11 - Алгоритм обслуживания прерывания по сигналу от внешней ЭВМ
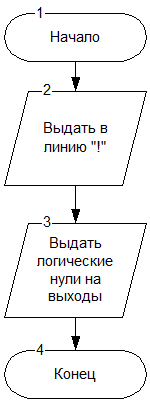 |
Рисунок 12 - Алгоритм обслуживания прерывания по ошибке
Данная программа производит чтение всех входных сигналов, выработку в соответствии с ними выходных воздействий, передачу на выход этих выходных воздействий. Программа производит обработку остановки от пульта оператора, прерывания по сигналу внешней ЭВМ. Данная программа является одинаковой для обоих вычислительных каналов (это необходимо для синхронизации работы обоих каналов). Текст программы приведен в приложении В.
Оценка аппаратурных затрат производится по количеству условных корпусов. За единицу сложности аппаратурных затрат принимается один 16-выводной корпус. Если корпус имеет большее число выводов, то его сложность берётся из таблицы 1 [1].
|
Таблица 1. Число условных корпусов в разных микросхемах |
|||||||
|
Число выводов в корпусе |
16 |
18 |
20 |
24 |
28 |
40 |
48 |
|
Коэффициент перевода |
1 |
1,2 |
1,4 |
2,8 |
3,2 |
4,5 |
7,5 |
Рассчитанное число аппаратурных затрат содержится в таблице 2.
|
Таблица 2. Аппаратурные затраты |
|||||
|
Тип микросхемы |
Название микросхемы |
Количество выводов |
Число корпусов |
Коэффициент перевода |
Число условных корпусов |
|
К1816ВЕ51 |
ОЭВМ |
40 |
1 |
4,5 |
4,5 |
|
К155РУ7 |
ОЗУ |
28 |
8 |
3,2 |
25,6 |
|
КР568РЕ3 |
ПЗУ |
28 |
2 |
3,2 |
6,4 |
|
К1113ПВ1А |
АЦП |
24 |
1 |
2,8 |
2,8 |
|
К572ПВ1 |
ЦАП |
48 |
1 |
7,5 |
7,5 |
|
КР590КН3 |
Коммутатор |
18 |
1 |
1,2 |
2,8 |
|
КР580ВР43 |
Портовый регистр |
24 |
3 |
2,8 |
8,4 |
|
К555ИР27 |
Регистр |
24 |
1 |
2,8 |
2,8 |
|
К555ЛА3 |
«И-НЕ» |
14 |
2 |
1 |
2 |
|
К555ЛА12 |
«И-НЕ» |
14 |
1 |
1 |
1 |
|
К555ЛИ1 |
«ИЛИ-НЕ» |
14 |
1 |
1 |
1 |
|
К155ЛЛ1 |
«ИЛИ» |
14 |
1 |
1 |
1 |
|
К170АП2 |
Формирователь |
14 |
1 |
1 |
1 |
|
К170УП2 |
Усилитель сигнала |
16 |
1 |
1 |
1 |
|
К140УД708 |
ОУ |
14 |
1 |
1 |
1 |
|
Всего |
26 |
68,8 |
|||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.