На такую сеть возлагаются обычно простые функции передачи сообщений за гарантированное время. Протяженность линий связи обычно не превышает десятков метров, размер сообщения — нескольких десятков байтов, а время доставки сообщения - в пределах от 0,01 до 1,0 с. Типичными являются два режима информационного обмена в сети: широковещательный, когда передаваемое сообщение предназначается для всех остальных подсистем (микроконтроллеров сети), и абонентский, когда сообщение предназначается только одному МК. Обычно первым способом передаются различные информационные параметры, используемые многими подсистемами. Это позволяет уменьшить загрузку сети за счет исключения множественных передач одного и того же сообщения различным адресатам. Вторым способом обычно передаются команды управления от центрального устройства к исполнительным или сообщения экстренного характера.
Наиболее широко распространены локальные сети двух структур: кольцевые и моноканальные (типа BITBUS). Последние являются более удобными для рассматриваемого класса управляющих микросетей, так как допускают простую наращиваемость и модифицируемость системы. Кроме того, в моноканальной микросети время доставки сообщения не зависит от общего числа МК и они обладают большей живучестью и надежностью.
В курсовом проекте требуется разработать двухзадачный контроллер в составе локальной микросети, состоящей из восьми микроконтроллеров. Расстояние между контроллерами в сети не более 15 м. Контроллер предназначен для работы в микропроцессорной системе управления технологическим процессом.
Каждый микроконтроллер должен обеспечивать работу со своим объектом управления и обмен данными с другими контроллерами в сети.
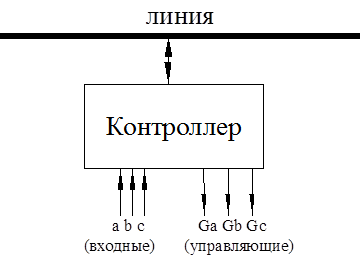
Рисунок 1. Структура контроллера
С объекта управления на микроконтроллер поступают следующие сигналы (см. рис.1.1.):
а – аналоговый сигнал с диапазоном изменения UÎ[0,1;10]В;
b – импульсный сигнал прямоугольной формы с частотой fÎ[0,1;1]кГц и амплитудой 2,5…6,5В. Измеряемым параметром является частота (измерение частоты производится путём подсчёта числа импульсов за интервал времени, равный 0,05 с);
с – статический ТТЛ сигнал с напряжением уровня логического нуля U0£0,4В и напряжением уровня логической единицы U1³2,5В.
Сигналы управления, поступающие с микроконтроллера на объект управления стандартные ТТЛ логики:
Ga=1, если напряжение сигнала a данного контроллера меньше сигналов a всех других контроллеров в сети;
Gb=1, если частота сигнала b минимальна для данного контроллера;
Gc – конъюнкция сигналов со всех контроллеров.
Применяемая элементная база:
· контроллер К1816ВЕ51;
· АЦП К1113ПВ1;
· передатчик КР559ИП2;
· приёмник КР559ИП1;
· элементы «ИЛИ-НЕ» К555ЛЕ1.
При использовании шинной топологии все узлы подключаются к одному каналу связи с помощью приёмопередатчиков. Канал оканчивается с двух сторон пассивными терминаторами, которые поглощают передаваемые сигналы, поскольку по своей природе передача по такой сети является широковещательной. Широковещательный режим работы позволяет уменьшить загрузку сети за счет исключения множественных передач одного и того же сообщения различным адресатам.
Моноканальная структура сети является наиболее удобной для реализации заданных функций, т.к. она допускает простую наращиваемость и модифицируемость системы, время доставки сообщения не зависит от числа работающих в данный момент микроконтроллеров. Моноканальная микросеть позволяет создавать гибкие и надёжные системы, в которых выход из строя одного или нескольких микроконтроллеров не отражается на функционировании сети в целом.
Физическая среда передачи шинной сети состит из одной секции кабеля. Узлы подключаются к шине с помощью специальной взрезки, которая просто прокалывает коаксиальный кабель до контакта с центральным проводником. Каждая взрезка и каждый соединитель изменяют характеристики физической среды передачи, поэтому имеются ограничения на длину кабеля, расстояние между соседними точками подключения и на количество подключений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.