Принципы построения МИУС. Архитектура однопроцессорных МИУС. Назначение основных функциональных блоков. Причины создания мультимикропроцессорных систем. Архитектура мультимикропроцессорных систем. Понятия параллельности, модульности, живучести, программной изменяемости (реконфигурации), структурной, функциональной и конструктивной однородности. Основные структуры мультимикропроцессорных систем: с общим и местными запоминающими устройствами, радиальная, шинная, кольцевая, с соединением по полному графу, с пирамидальной иерархической архитектурой, с регулярным объединением через коммутаторы, память и дельта сеть.
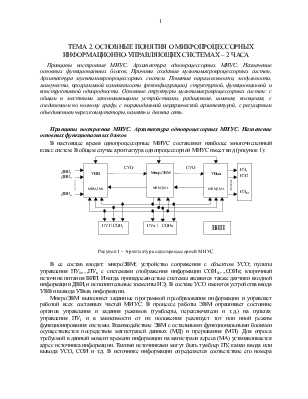
В настоящее время однопроцессорные МИУС составляют наиболее многочисленный класс систем. В общем случае архитектура однопроцессорной МИУС имеет вид (рисунок 1):
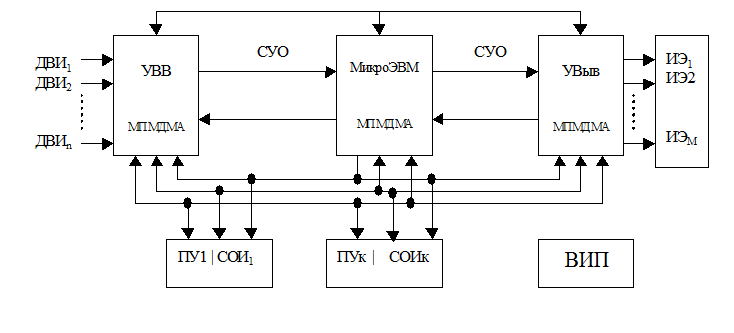
Рисунок 1 – Архитектура однопроцессорной МИУС
В ее состав входят: микроЭВМ; устройство сопряжения с объектом УСО; пульты управления ПУ1,...,ПУк с системами отображения информации СОИ1,...,СОИк; вторичный источник питания ВИП. Иногда принадлежностью системы являются также датчики входной информации ДВИi и исполнительные элементы ИЭj. В составе УСО имеются устройства ввода УВВ и вывода УВыв. информации.
МикроЭВМ выполняет заданные программой преобразования информации и управляет работой всех составных частей МИУС. В процессе работы ЭВМ опрашивает состояние органов управления и задания режимов (тумблеры, переключатели и т.д.) на пультах управления ПУi и в зависимости от их положения реализует тот или иной режим функционирования системы. Взаимодействие ЭВМ с остальными функциональными блоками осуществляется посредством магистралей данных (МД) и прерывания (МП). Для опроса требуемой в данный момент времени информации на магистрали адреса (МА) устанавливается адрес источника информации. Такими источниками могут быть тумблер ПУ, канал ввода или вывода УСО, СОИ и т.д. В источнике информации определяется соответствие его номера адресу и обеспечивается выдача информации по магистрали МД. В этом случае инициатором обмена является ЭВМ.
С целью уменьшения времени реакции системы на изменения состояния объекта управления УСО, ПУ и СОИ могут формировать запросы на прерывание работы в текущем режиме и переход к обработке новой информации. Для этого в МИУС предусматривается магистраль прерывания МП.
Устройство ввода УВВ выполняет функцию приведения информации, полученной от ДВИi, к виду, удобному для использования в ЭВМ. Как правило, ЭВМ использует информацию, представленную в двоичном коде: параллельном, последовательном и параллельно последовательным.
Информация от ДВИ1 имеет весьма разнообразный характер и может содержать ошибки измерений и быть искаженной помехами в линиях связи. Поэтому УВВ составляют в большинстве МИУС значительную не только по объему, но и по ее роли в системе часть. Аналогичные задачи преобразования, но в обратной последовательности выполняет устройство вывода информации УВыв. В ряде случаев оно преобразует информацию, полученную от ЭВМ, не только к виду, удобному для исполнительных элементов ИЭi, но и обеспечивает усиление полученных сигналов.
С точки зрения пользователя МИУС представляет собой совокупность тем или иным способом конструктивно выполненных и установленных на объекте блоков обработки информации, которые всегда выполняют ожидаемую и объявленную в технических условиях функцию. Единственным средством общения пользователя с системой и посредством ее с объектом управления являются ПУ и СОИ.
Пульт управления обеспечивает перевод МИУС из одного режима работы в другой, ручной ввод числовой информации, покомандное исполнение отдельных операций МИУС и т.д. Необходимые сведения о состоянии системы и объекта управления выводятся на СОИ.
Вторичный источник питания ВИП, кроме главной функциональной задачи – обеспечения потребителей (ЭВМ, ПУ, СОИ, УСО) необходимым питанием (по номенклатуре, величине и нагрузке), – выполняет не менее важную роль фильтра помех, возникающих в цепях первичной цепи. Корректная разработка ВИП и правильная разводка цепей питания МИУС обеспечивает стабильную работу в широком диапазоне температур и в условиях помех в первичных источниках питания.
Для современного этапа развития МИУС характерен переход от МИУС с одним микропроцессором к многопроцессорным ИУС, в которых сложнейшие задачи управления выполняются одновременно множеством микропроцессоров. Существуют два типа многопроцессорных систем: многомашинные и мульитпроцессорные системы.
Системы, в которых отдельные ЭВМ, работая в основном под управлением своих операционных систем, могут одновременно выполнять различные части одной задачи и имеют собственные УВВ, называют многомашинными. Системы, в которых управление процессорами осуществляется одной операционной системой и используется общее ЗУ, независимо от наличия в процессорах местных ЗУ и устройств управления называют мультипроцессорными.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.