Лабораторная работа №13
Студента гр. ЭC-31 Рубцова К.М..
Сведения из теории.
Передача информации будет осуществляться в асинхронном режиме.
Данный режим позволяет осуществлять однонаправленный ввод/вывод информации по линиям RxD и TxD. Первоначально ПСА настраивается на работу в режиме с отношением частот передачи и синхронизации 1:16. Внутренняя синхронизация осуществляется частотой 153,6 кГц, поступающей от таймера.
Слово выбора режима работы ПСА а асинхронном режиме:

где
S2S1 - длина стоповой посылки (01 - 1 бит, 10 - 1.5 бита, 11-2 бита)
ЕР - вид контроля четности (0 - нечет, 1 - чет)
РЕ - контроль четности (0 - выключен, 1 - включен)
L2L1 - длина символа (00 - 5 бит, 01-6 бит, 10-7 бит, 11-8 бит)
В2В1 - делитель частоты (01 - 1:1, 10 - 1:16, 11 - 1:64)
Командное слово работы ПСА:

где
EN - поиск синхросимвола (0 - выключен, 1 - включен)
IR - сброс ПСА (1 - сброс)
ER - сброс флагов ошибок (1 - сброс)
SBRK - конец передачи/разрыв связи (1 - конец)
RxE - Прием (0 - запрещен, 1 - разрешен)
ТхЕ - Передача (0 - запрещена, 1 - разрешена)
RTS, DTR - установка соответствующих линий модема
Слово состояния ПСА:

где
DSR, SYNDET - значения соответствующих линий модема
FE - ошибка формата
ОЕ - ошибка переполнения
РЕ - ошибка четности
TxEMPTY - передатчик пуст
RxRDY - готовность приемника
TxRDY - готовность передатчика
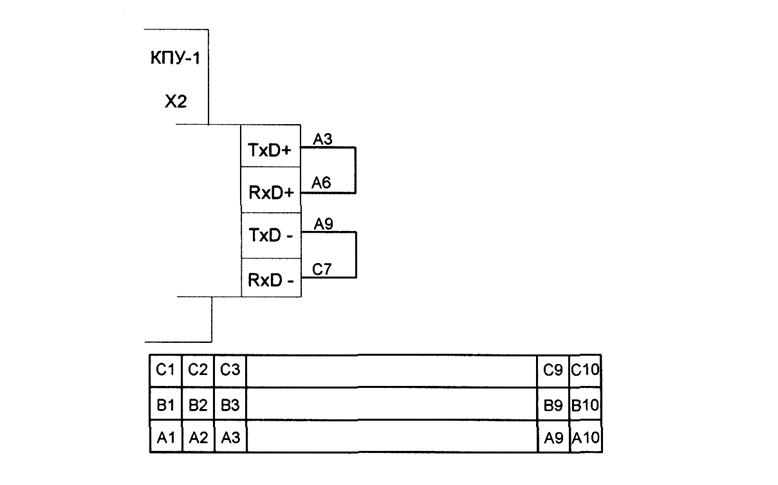
Для передачи информации из КПУ-1 будет использован метод «Токовая петля 20мА». Перед работой с ПСА необходимо запустить таймер. Ошибки обрабатываться не будут. Загрузку MI осуществляет монитор КПУ.
Схема соединения КПУ:
Предварительно заносим в передатчике, начиная с адреса 1950h, следующие значения: 11 – 22 – 33 – 44 – 55 – 66 – 77 – 88. Начиная с адреса 1960h и по адрес 1968h, заносим 00h.
Листинг программы, осуществляющей пересылку данных.
|
Адрес |
Код |
Метка |
Мнемокод |
|
1900 |
PSID |
EQU F8 |
|
|
1900 |
PSIC |
EQU F9 |
|
|
1900 |
TIMER |
EQU F2 |
|
|
1900 |
DISP |
EQU E4 |
|
|
1900 |
11 60 19 |
INIT |
LXI D, 1960 |
|
1903 |
3E 04 |
MVI A, 04 |
|
|
1905 |
D3 E2 |
OUT TIMER |
|
|
1907 |
D3 E2 |
OUT TIMER |
|
|
1909 |
06 08 |
MVI B, 08 |
|
|
190B |
21 50 19 |
LXI H, 1950 |
|
|
190E |
3E 15 |
8BYTE |
MVI A, 15 |
|
1910 |
D3 F9 |
OUT PSIC |
|
|
1912 |
7E |
MOV A, M |
|
|
1913 |
D3 F8 |
OUT PSID |
|
|
1915 |
DB F9 |
TXRDY |
IN PSIC |
|
1917 |
E6 01 |
ANI 01 |
|
|
1919 |
CA 15 19 |
JZ TXRDY |
|
|
191C |
DB F8 |
IN PSID |
|
|
191E |
EB |
XCHG |
|
|
192F |
77 |
MOV M, A |
|
|
1920 |
23 |
INX H |
|
|
1921 |
EB |
XCHG |
|
|
1922 |
23 |
INX H |
|
|
1923 |
05 |
DCR B |
|
|
1924 |
C2 0E 19 |
JNZ 8BYTE |
|
|
1927 |
3E 37 |
END |
MVI A, 37 |
|
1929 |
D3 E4 |
OUT DISP |
|
|
192B |
3E 39 |
MVI A, 39 |
|
|
192D |
D3 E4 |
OUT DISP |
|
|
192F |
3E 77 |
MVI A, 77 |
|
|
1931 |
D3 E4 |
OUT DISP |
|
|
1933 |
76 |
HLT |
|
Выводы: В ходе выполнения лабораторной работы была изучена структура и режимы работы ПСА, а также написана программа, осуществляющая пересылку 8 байт информации из одной области памяти КПУ (1950h – 1958h) в другую (1960h – 1968h) через ПСА. Наличие встроенного последовательного интерфейса позволяет контроллерам обмениваться информацией на большом удалении друг от друга.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.