

Выполнил Громов Е.А., ЭМ-22, вариант
Цель работы: Ознакомление с динамическими и частотными характеристиками линейных стационарных динамических систем и получение навыков исследования их моделей в ControlSystemToolbox.
1. Постановка задачи
В качестве объекта исследования выступают линейные (линеаризованные) динамические стационарные ТС с одним входом и одним выходом. При этом модель одномерной технической ТС (ТС) задана в виде комплексной передаточной функции, записанной как отношение полиномов
 .
.
Необходимо:
![]() ,
, ![]() .
.
h(t), w(t).
L (w ).
W(iw), w = [0, ¥ ].
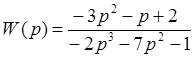
Задана передаточная функция ТС
Листинг программы:
% Создаю LTI-объект с именем w
w=tf([-3 -1 2],[-2 -7 0 -1])
% Нахожу полюса передаточной функции
pole(w)
% Нахожу нули передаточной функции
zero(w)
% Строю график переходной функции
step(w)
% Строю график импульсной переходной функции
impulse(w)
% Строю диаграмму Боде
bode(w)
% Строю частотный годограф Найквиста
nyquist(w)
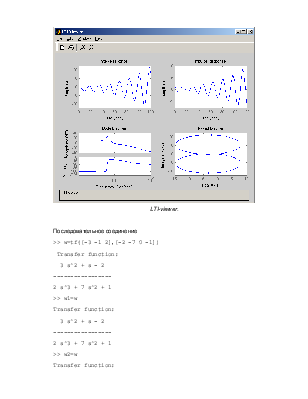
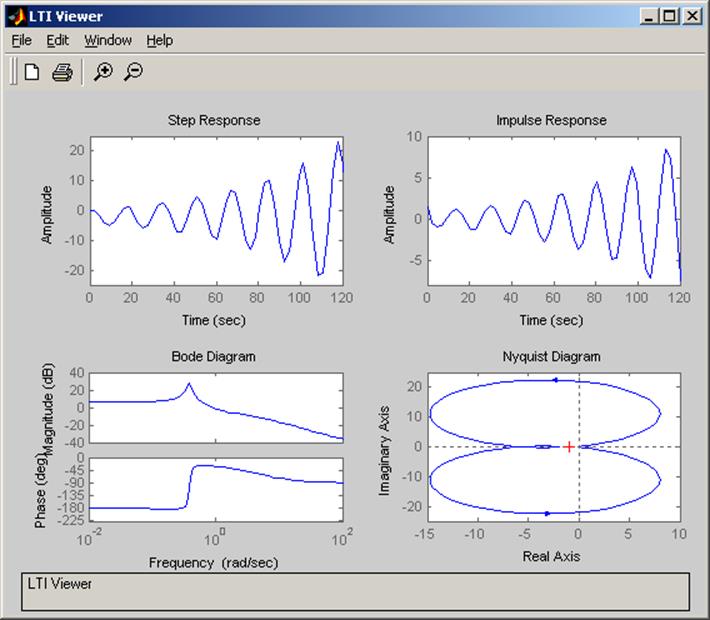
% Выполняю построение последних четырёх графиков в LTI-viewer
ltiview(w)
Результаты расчёта:
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
Полюса функции
ans =
-3.5399
0.0200 + 0.3753i
0.0200 - 0.3753i
Нули функции
ans =
-1.0000
0.6667
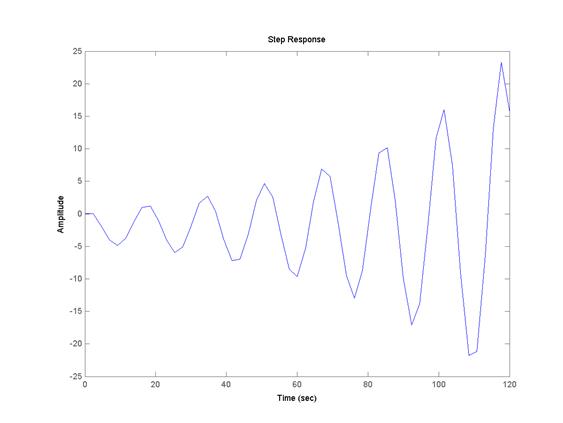
Переходная функция h(t).
Построим импульсную переходную функцию командой impulse(w).
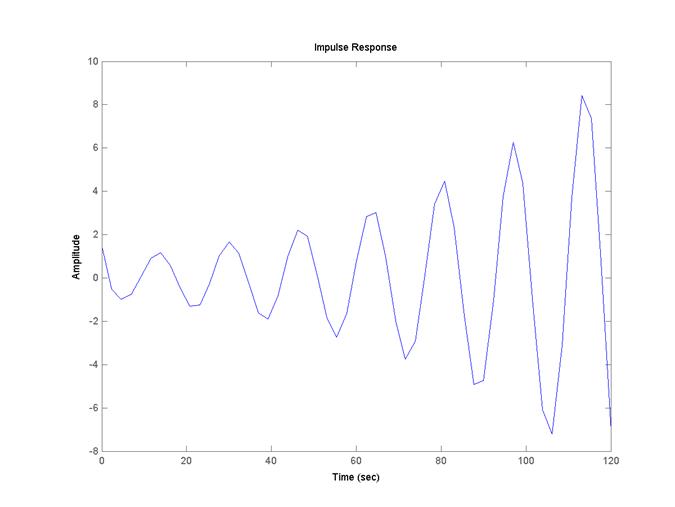
Импульсная переходная функция.
Диаграмму Боде получаю, используя команду bode(w)
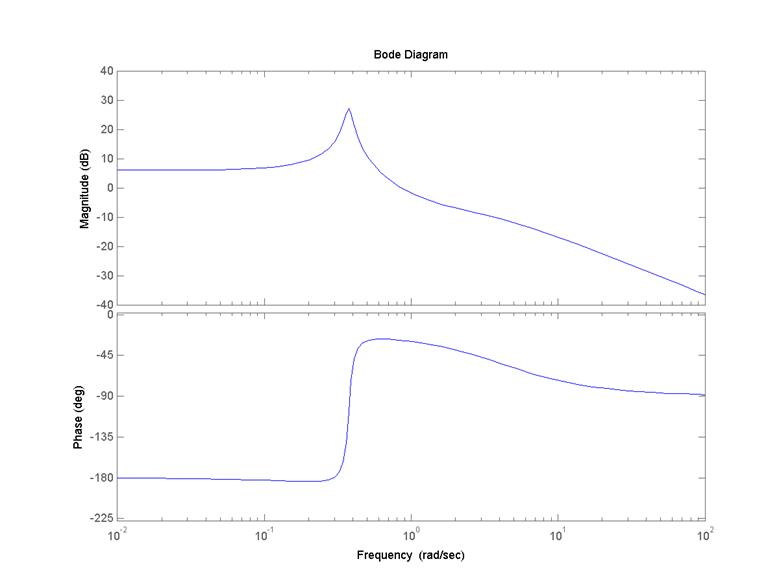
Логарифмические частотные характеристики.
Определяю частотный годограф Найквиста, выполнив команду nyquist(w)
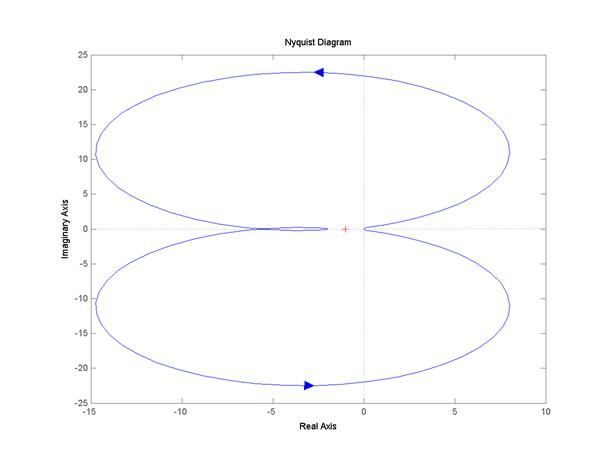
Частотный годограф.
 |
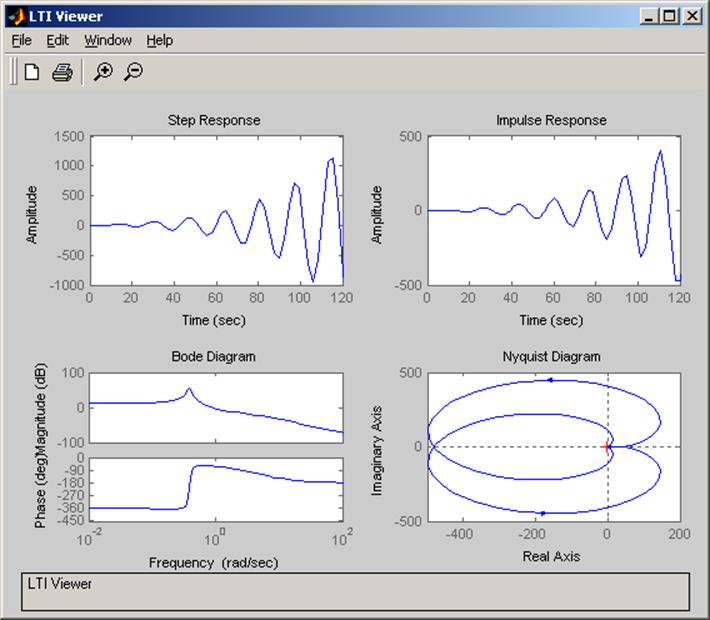
Последовательное соединение
>> w=tf([-3 -1 2],[-2 -7 0 -1])
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
>> w1=w
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
>> w2=w
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
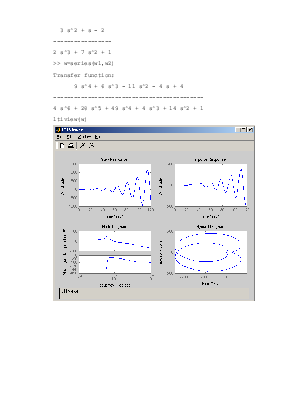
>> w=series(w1,w2)
Transfer function:
9 s^4 + 6 s^3 - 11 s^2 - 4 s + 4
--------------------------------------------
4 s^6 + 28 s^5 + 49 s^4 + 4 s^3 + 14 s^2 + 1
ltiview(w)
 |
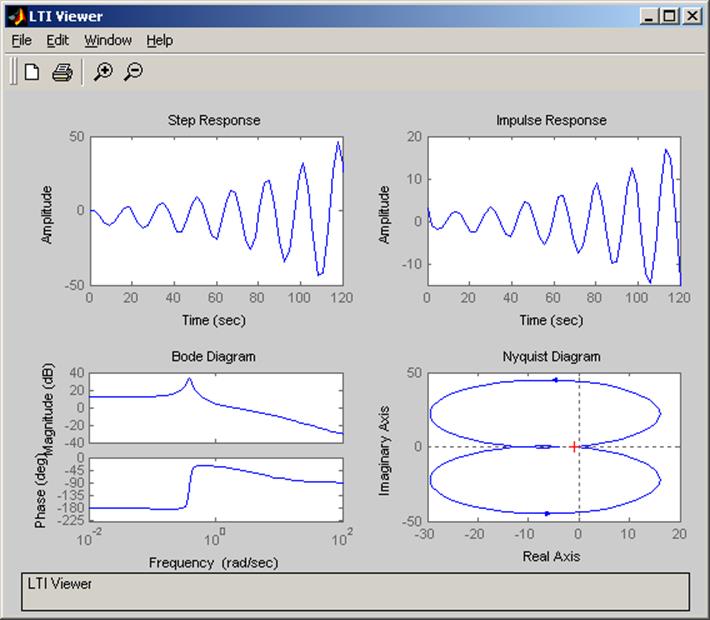
Параллельное соединение
w=tf([-3 -1 2],[-2 -7 0 -1])
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
w1=w
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
w2=w
Transfer function:
3 s^2 + s - 2
-----------------
2 s^3 + 7 s^2 + 1
>> w=parallel(w1,w2)
Transfer function:
12 s^5 + 46 s^4 + 6 s^3 - 22 s^2 + 2 s - 4
----------------------------------------
4 s^6 + 28 s^5 + 49 s^4 + 4 s^3 + 14 s^2 + 1
ltiview(w)
Вывод: Впроцессе выполнения данной лабораторной работы я ознакомился с динамическими и частотными характеристиками линейных стационарных динамических систем и получил навыки исследования их моделей в Control System Toolbox.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.