Более 60% вырабатываемой энергии преобразуется в механическую, приводящую в движение различные машины. Преобразование осуществляется посредством электрических приводов (ЭП).
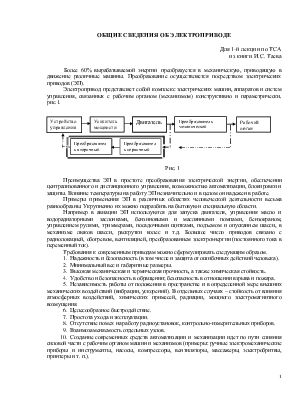
Электропривод представляет собой комплекс электрических машин, аппаратов и систем управления, связанных с рабочим органом (механизмом) конструктивно и параметрически, рис.1.
 |
Преимущества ЭП в простоте преобразования электрической энергии, обеспечении централизованного и дистанционного управления, возможностью автоматизации, блокировки и защиты. Влияние температуры на работу ЭП незначительно и в целом он надежен в работе.
Примеры применения ЭП в различных областях человеческой деятельности весьма разнообразны. Укрупненно их можно подразбить на бытовую и специальную области.
Например в авиации ЭП используются для запуска двигателя, управления масло и водорадиаторными заслонками, бензиновыми и маслянными помпами, бензокраном, управлением рулями, триммерами, посадочными щитками, подъемом и опусканием шасси, в механизме люков шасси, раскрутки колес и т.д. Большое число приводов связано с радиолокацией, обогревом, вентиляцией, преобразованием электроэнергии (постоянного тока в переменный ток).
Требования к современным приводам можно сформулировать следующим образом.
1. Надежность и безопасность (в том числе и защита от ошибочных действий человека).
2. Минимальный вес и габаритные размеры.
3. Высокая механическая и термическая прочность, а также химическая стойкость.
4. Удобство и безопасность в обращении; безопасность в отношении взрыва и пожара.
5. Независимость работы от положения в пространстве и в определенной мере внешних механических воздействий (вибрации, ускорений). В отдельных случаях – стойкость от влияния атмосферных воздействий, химических примесей, радиации, мощного электромагнитного возмущения.
6. Целесообразное быстродействие.
7. Простота ухода и эксплуатации.
8. Отсутствие помех на работу радиоустановок, контрольно-измерительных приборов.
9. Взаимозаменяемость отдельных узлов.
10. Создание современных средств автоматизации и механизации идет по пути слияния силовой части с рабочим органом машин и механизмов (примеры: ручные электромеханические приборы и инструменты, насосы, компрессоры, вентиляторы, массажеры, электробритвы, принтеры и т. п.).
Современному техническому специалисту знания в области электромеханических устройств могут быть необходимы в следующих направлениях.
При эксплуатации: контроль исправного состояния, профилактические и ремонтные работы в меру возможностей имеющегося ремонтного оборудования, настройка рабочих режимов, частичная модернизация в силу производственной необходимости.
При проектировании: знание свойств современных ЭП различного рода тока, исполнения компонент (источников электропитания, аппаратов, двигателей, редукторов), режимов работы, навыки комплектования ЭП на основе справочной литературы, работы с математическими моделями приводов в среде MatLab.
С периода зарождения (вторая половина 19 столетия) и до наших дней ЭП претерпел значительное развитие как в плане совершенствования его компонент, так и в направлении применения.
В первую очередь это касается электрических машин и аппаратов, затем схем управления, датчиков обратной связи и, наконец, согласующих устройств.
В ЭП применяется большое многообразие электрических машин. Их можно классифицировать по конструктивным признакам и принципам работы.
Приводные и исполнительные:
– коллекторные ДПТ;
– бесколлекторные ДПТ;
– синхронные двигатели (СД, переменного тока, 1, 3-х фазные);
– асинхронные двигатели(АД, переменного тока, 1, 2, 3-х фазные);
– шаговые двигатели;
– двигатели с катящимся ротором (ДКР, переменного тока);
– линейные (ЛД постоянного и переменного тока).
Информационные (измерители рассогласования, преобразователи сигнала, датчики положения, скорости, ускорения):
– вращающиеся трансформаторы (ВТ);
– фазовращатели (ФВ);
– сельсины (С-датчик и С-приемник);
– магнитосины;
– тахогенераторы (постоянного и переменного тока).
– силовые (ДПТ, АД, СД, ДКР);
– стабилизации скорости вращения (ДПТ, АД, СД);
– прецизионного перемещения (ДПТ, АД, СД, ШД, ДКР);
– следящий (ДПТ, ШД).
Представленная классификация весьма не полная.
В современных устройствах, средствах и системах управления находят применение:
– двигатели линейных и угловых перемещений (ферродинамические, магнитоэлектрические, электромагнитные);
– датчики линейных перемещений (контактные, резистивные, индуктивные, индукционные, емкостные).
Весьма богат арсенал средств управления ЭП. Прежде всего это касается так называемых аппаратов.
Электрический аппарат (ЭА)– это электротехническое устройство для коммутации, стабилизации и регулирования электрических, механических или иных нагрузок.
Коммутация (с латинского – изменение) бывает ступенчатой (более распространенно) или плавной.
Все многообразие ЭА может быть представлено схемой
В источниках регулируемого напряжения применяются трансформаторы, в информационных и преобразовательных устройствах находит применение практически весь арсенал полупроводниковой техники.
Оконечные каскады питания ЭП (усилителей мощности) могут быть выполнены на основе электромеханичских генераторов постоянного и переменного тока, средств силовой преобразовательной техники, работающей в аналоговом и импульсном режимах.
В устройствах сопряжения двигателя с рабочим органом (РО) механизма применяются различные преобразователи механической энергии. Это редукторы с цилиндрическими, коническими зубчатыми колесами, червячными зацеплениями, клиноременными, текстропными передачами, вариаторами. В большинстве случаев преобразование механической энергии связано с изменением скорости перемещения РО по отношению к двигателю. Изменяется и характер движения. В ряде случаев вращательное движение преобразуется в поступательное с применением передачи «винт-гайка» либо более прецизионной шарико - винтовой передачи).
Существующие книги по электромашинным устройствам автоматики рассчитаны на студентов, хорошо знающих теоретические основы электротехники и физику электромеханического преобразования энергии, изучаемого еще в средней общеобразовательной школе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.