Примечание: данный масштаб выбран для построения плана на ЭВМ в системе “Компас”.
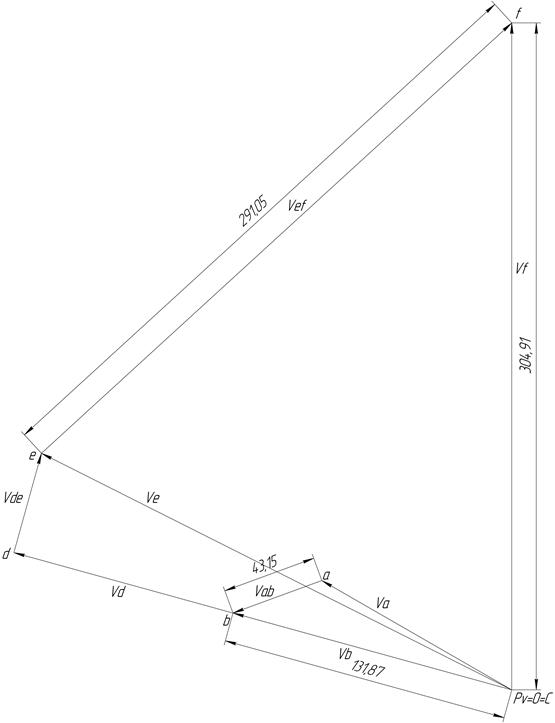
I.3.3 План скоростей
Для определения угловых и линейных ускорений продифференцируем полученные выше кинематические уравнения по времени второй раз:
Ускорение точек D и E найдем из подобия.

Эти уравнения можно записать в виде:
Для построения плана ускорений выберем полюс Рw и масштаб:
Примечание: данный масштаб выбран для построения плана на ЭВМ в системе “Компас”.
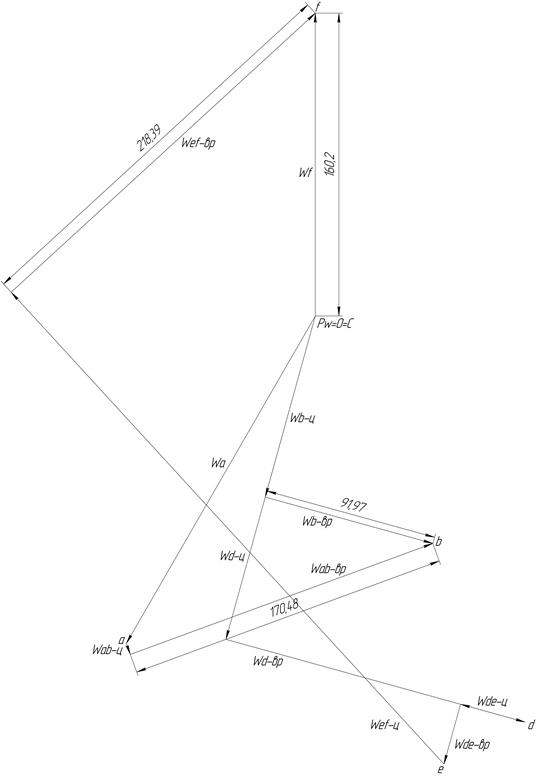
I.3.4 План ускорений
Сравним кинематические параметры механизма, полученные аналитическим и графоаналитическим методами.
I.3.7 Таблица сравнений №1
|
Аналитический метод |
Графоаналитический метод |
Приложение MathCad |
|
|
Xa |
0.040 |
0.040 |
0.040 |
|
Xa’ |
-0.069 |
-0.069 |
-0.069 |
|
Xa’’ |
-0.040 |
-0.040 |
-0.040 |
|
Ya |
0.069 |
0.069 |
0.069 |
|
Ya’ |
0.040 |
0.040 |
0.040 |
|
Ya’’ |
-0.069 |
-0.069 |
-0.069 |
|
Xb |
-0.125 |
-0.125 |
-0.125 |
|
Xb’ |
-0.102 |
-0.102 |
-0.102 |
|
Xb’’ |
0.025 |
0.025 |
0.025 |
|
Yb |
0.520 |
0.520 |
0.520 |
|
Yb’ |
0.028 |
0.028 |
0.028 |
|
Yb’’ |
-0.048 |
-0.048 |
-0.048 |
|
Xd |
-0.067 |
-0.067 |
-0.067 |
|
Xd’ |
-0.182 |
-0.182 |
-0.182 |
|
Xd’’ |
0.044 |
0.044 |
0.044 |
|
Yd |
0.732 |
0.732 |
0.732 |
|
Yd’ |
0.050 |
0.050 |
0.050 |
|
Yd’’ |
-0.086 |
-0.086 |
-0.086 |
|
Xe |
0.030 |
0.030 |
0.030 |
|
Xe’ |
-0.172 |
-0.172 |
-0.172 |
|
Xe’’ |
0.027 |
0.027 |
0.027 |
|
Ye |
0.705 |
0.705 |
0.705 |
|
Ye’ |
0.087 |
0.087 |
0.087 |
|
Ye’’ |
-0.095 |
-0.095 |
-0.095 |
|
Yf |
0.411 |
0.411 |
0.411 |
|
Yf’ |
0.244 |
0.244 |
0.244 |
|
Yf’’ |
0.064 |
0.064 |
0.064 |
|
Fi2 |
290.157 |
290.157 |
290.157 |
|
Fi2’ |
0.072 |
0.072 |
0.072 |
|
Fi2’’ |
-0.142 |
-0.142 |
-0.142 |
|
Fi3 |
74.550 |
74.550 |
74.550 |
|
Fi3’ |
0.377 |
0.377 |
0.377 |
|
Fi3’’ |
-0.131 |
-0.131 |
-0.131 |
|
Fi4 |
132.535 |
132.535 |
132.535 |
|
Fi4’ |
0.582 |
0.582 |
0.582 |
|
Fi4’’ |
0.218 |
0.218 |
0.218 |
План скоростей при q=109.01310
План ускорений при q=109.01310
II Часть
II.1.1 Введение
Выходное звено 5 совершает поступательное движение, поэтому рабочая нагрузка задается в виде нагрузочной диаграммы.
При построении зависимости P(φ) учитывается два обстоятельства:
а)
рабочему ходу соответствует больший угол поворота кривошипа ![]() , а холостому ходу – меньший угол поворота
, а холостому ходу – меньший угол поворота ![]()
б) знак рабочей нагрузки противоположен знаку скорости выходного звена 5.
График зависимости рабочей нагрузки от угла поворота кривошипа:
|
![]()
|
|
|
|
![]()
|
|
|
![]()
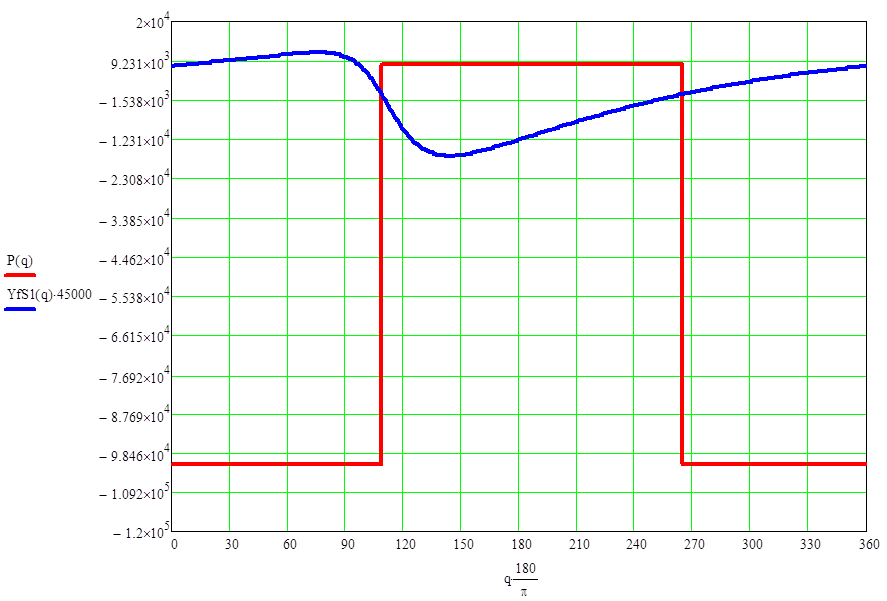
Рисунок II.1.1,12
II.1.2 Кинетостатический расчет механизма
Задачей кинетостатического расчета механизма является определение реакций в кинематических парах и движущего момента Q с учетом сил инерции подвижных звеньев.
Массы звеньев, совершающих вращательные движения определим
по зависимости: ![]() , где
, где ![]() - длина
звена,
- длина
звена, - погонная масса.
- погонная масса.
Тогда:
|
|
|
|
|
|
|
|
|
|
Осевые моменты инерции вращающихся звеньев определяем по формулам:
|
|
|
|
|
|
|
|
Силы тяжести звеньев определим по формуле:
![]()
|
|
|
|
|
|
|
|
|
|
Координаты центров масс звеньев:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проекции сил инерции и моменты сил инерции:
Силы инерции:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Моменты инерции:
|
|
|
|
|
|
Составление и аналитическое решение уравнений кинетостатики
Группа ВВП(звенья 4 и 5):
|
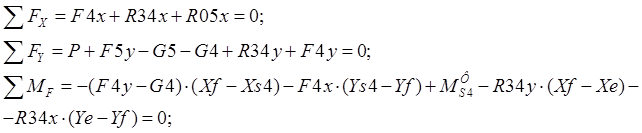
Реакции:
|
|
|
|
|
|
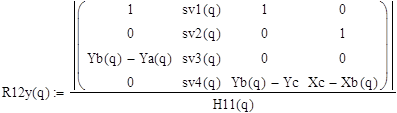
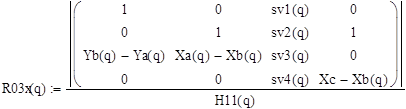
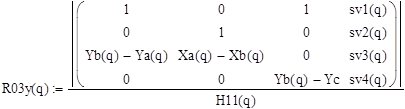
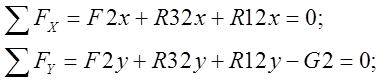
Группа ВВВ(звенья 2 и 3):
|
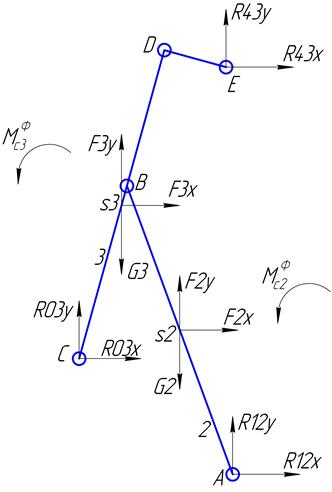
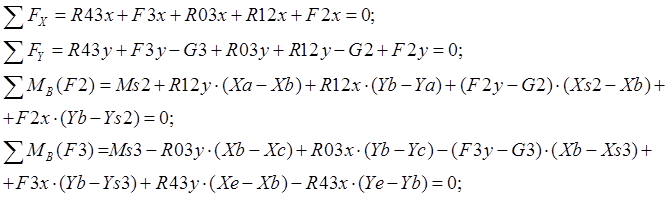
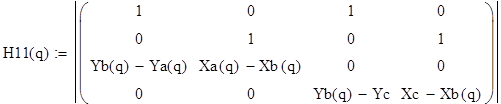
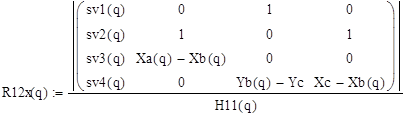
Реакции:
![]()
![]()
![]()
![]()
Звено 2:
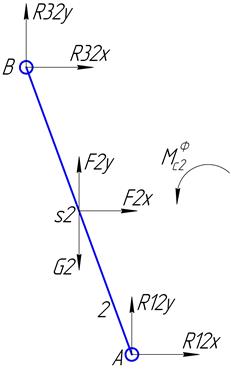
Рисунок II.1.2 ,15
Реакции:
|
|
|
|
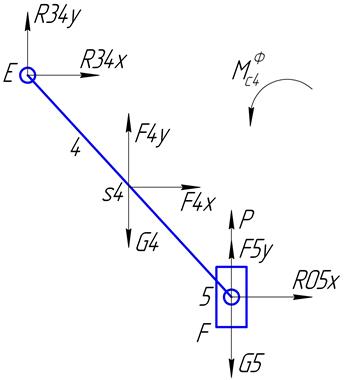
Звено 5:
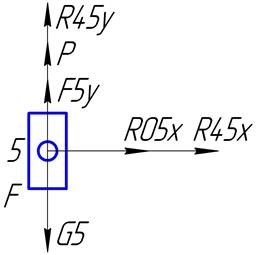
Рисунок II.1.2 ,16
Реакции:
|
|
|
|
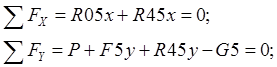
Кривошип:
Рисунок II.1.2 ,17
Реакции:
|
|
|
|
|
|
С помощью общего уравнения динамики:

Определим движущий момент (проверка):
![]()
![]()
![]()
![]()
![]()
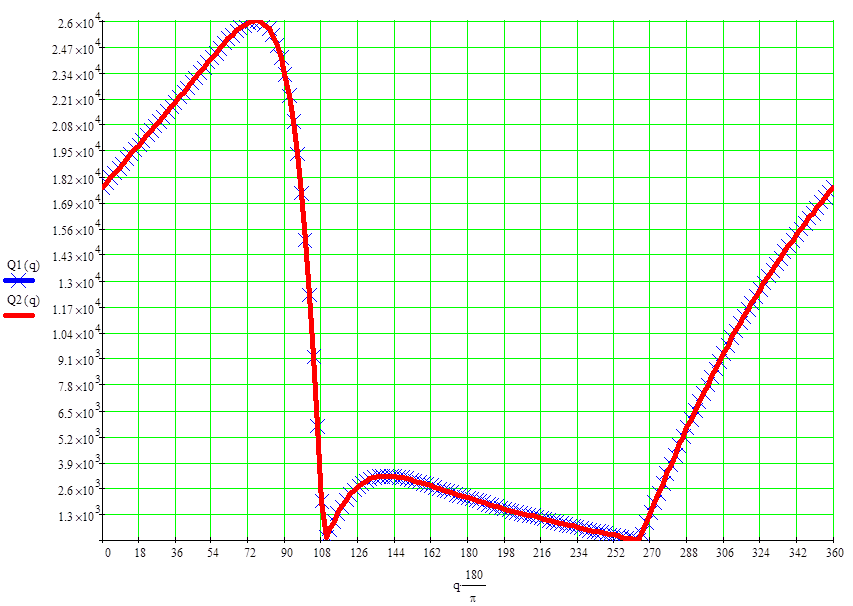
Рисунок II.1.2 ,18
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.