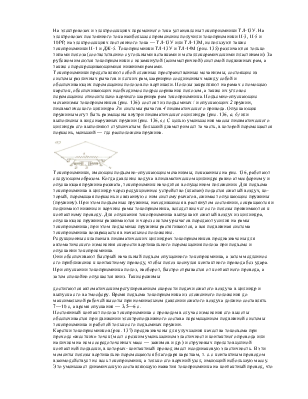
На электровозах и электросекциях переменного тока установлены токоприемники ТЛ-13У. На электровозах постоянного тока наибольшее применение получили токоприемники П-3, П-5 и 10РР, на электросекциях постоянного тока — ТЛ-13У или ТЛ-13М, используют также токоприемники П-1 и ДЖ-5. Токоприемники ТЛ-13У и ТЛ-14М (рис. 135) различаются только типами полоза (соответственно с угольными вставками и металлокерамическими пластинами). За рубежом имеются токоприемники с незамкнутой (асимметричной) системой подвижных рам, а также с перекрещивающимися нижними рамами.
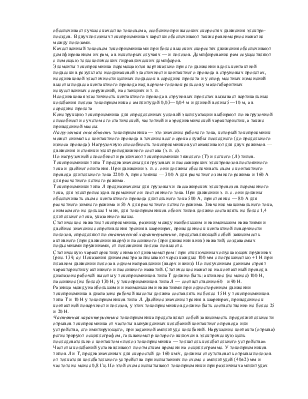
Токоприемники представляют собой сложные пространственные механизмы, состоящие из системы различных рычагов и легких рам, шарнирно соединенных между собой и обеспечивающих перемещение полозов по вертикали. Полозы закрепляют на рамах с помощью кареток, обеспечивающих необходимое подрессоривание полозом, а также их угловое перемещение относительно верхнего шарнира рам токоприемника. Подъемно-опускающие механизмы токоприемников (рис. 136). состоят из подъемных / и опускающих 2 пружин, пневматического цилиндра 3 и системы рычагов 4 пневматического привода. Опускающие пружины могут быть размещены внутри пневматического цилиндра (рис. 136, а, б) или выполнены в виде наружных пружин (рис. 136, в), С целью уменьшения массы пневматического цилиндра его выполняют ступенчатым: больший диаметр имеет та часть, в которой перемещается поршень, меньший — где расположена пружина.
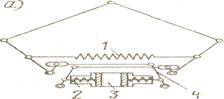
Токоприемники, имеющие подъемно-опускающие механизмы, показанные на рис. 136, работают следующим образом. Когда давление водуха в пневматическом цилиндре равно атмосферному и опускающая пружина разжата, токоприемник находится в опущенном положении. Для подъема токоприемника в цилиндр через редукционное устройство (клапан) подается сжатый воздух, который, перемещая поршень и связанную с ним систему рычагов, сжимает опускающие пружины (пружину). При этом подъемные пружины, находившиеся в растянутом состоянии, сокращаются и поднимают нижние и верхние рамы токоприемника, вследствие чего его полозы прижимаются к контактному проводу. Для опускания токоприемника выпускают сжатый воздух из цилиндра, опускающие пружины разжимаются и через систему рычагов передают усилия на рамы токоприемника; при этом подъемные пружины растягиваются, а вся подвижная система токоприемника возвращается в начальное положение.
Редукционные клапаны в пневматических цилиндрах токоприемников предназначены для автоматического изменения скорости вертикального перемещения полоза при подъеме и опускании токоприемника.
Они обеспечивают быстрый начальный подъем опущенного токоприемника, а затем медленное его приближение к контактному проводу, чтобы полоз коснулся контактного провода без удара. При опускании токоприемника полоз, наоборот, быстро отрывается от контактного провода, а затем спокойно опускается вниз. Такие режимы
достигаются автоматическим регулированием скорости подачи сжатого воздуха в цилиндр и выпуска его в атмосферу. Время подъема токоприемника из сложенного положения до максимальной рабочей высоты при номинальном давлении сжатого воздуха должно составлять 7—10 с, а время опускания — 3,5—6 с.
Постоянный контакт полоза токоприемника с проводом в случае изменения его высоты обеспечивается при движении электроподвижного состава перемещением
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.