Рис.17
В данном примере вычисление функций D1,D2,D3 и Z. производится по методу непосредственного вычисления булевых функций [4]. На блок-схеме алгоритма в поле комментария проставлены номера команд, которые реализуют данный блок на ассемблере.
Во время инициализации программы ППА D58 настраивается в режим “0”. Далее идет присвоение функциям Y1,Y2, Y3 значений 0,0,0, соответствующих начальному состоянию автомата Si = 1 (см.табл.3). Затем производится ввод переменной X и последовательно вычисляются новые значения функций Y1, Y2, Y3 и Z.
После этого идет передача значений Y1, Y2, Y3 на место значений y1,y2,y3 и формирование выходного вектора в регистре РОН Е с передачей его содержимого в выходной порт А ППА D58, а затем ввод нового значения X.
Данный способ является компиляционным. Он позволяет обрабатывать последовательно во времени несколько разных программ автоматов. Существует также возможность параллельной во времени обработки нескольких одинаковых программ автоматов одним процессором, используя свойство поразрядной обработки булевых функций. Недостатком метода является сложность программы и снижение быстродействия по сравнению с приведенными выше способами.
5. МЕТОДИКА ВШОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
1. Ознакомиться с разделами 1,2,3,4 данных методических указаний.
2. Получить вариант задания и метод программной реализации конечного автомата у преподавателя.
3. Для заданного автомата построить таблицу переходов и таблицу выходов либо вычислить булевые функции включения элементов памяти и выходной функции с учетом требований заданного метода программной реализации.
4. Для заданного конечного автомата построить блок-схему алгоритма и написать текст программы на ассемблере К580 при ручном ассемблировании.
5. Произвести необходимые соединения на лицевой панели лабораторного стенда.
6. Ввести программу в память микроЭвм.
7. Запустить программу на исполнение и сравнить результаты работы программы с графом переходов автомата или с таблицами ТП и ТВ.
8. Результаты представить в виде индивидуального отчета.
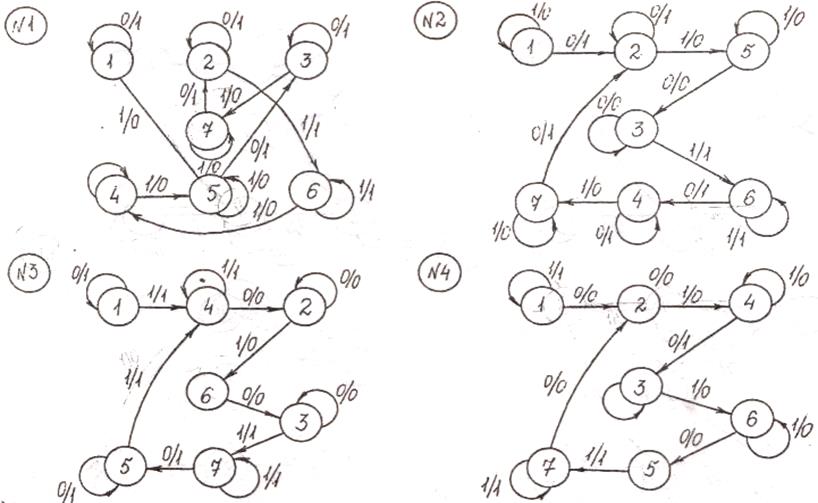
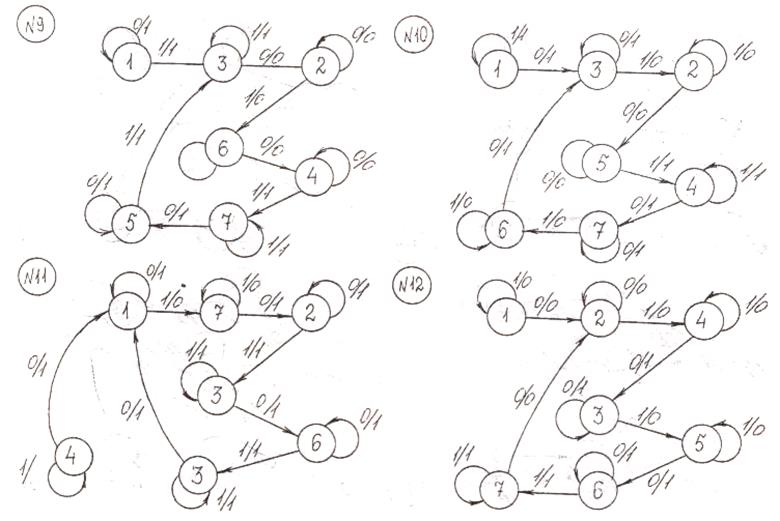
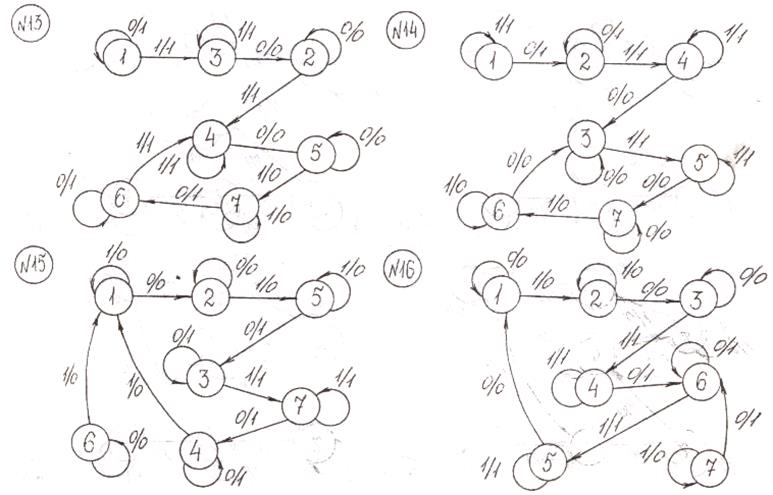
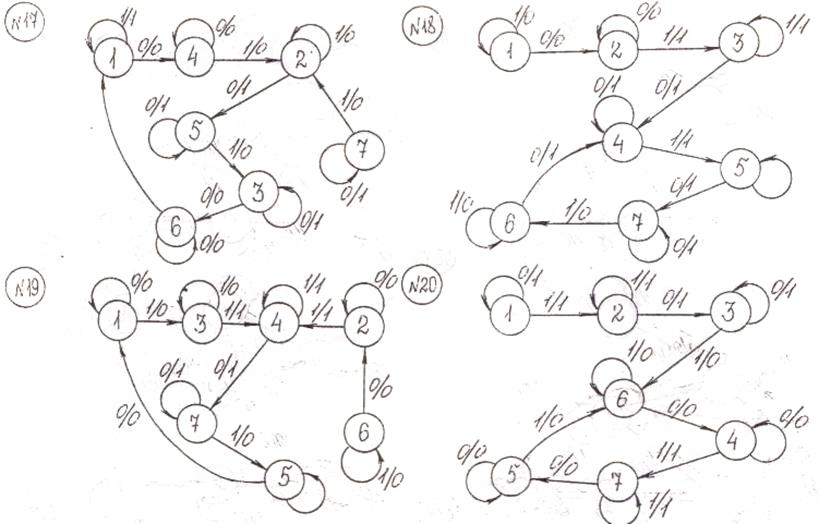
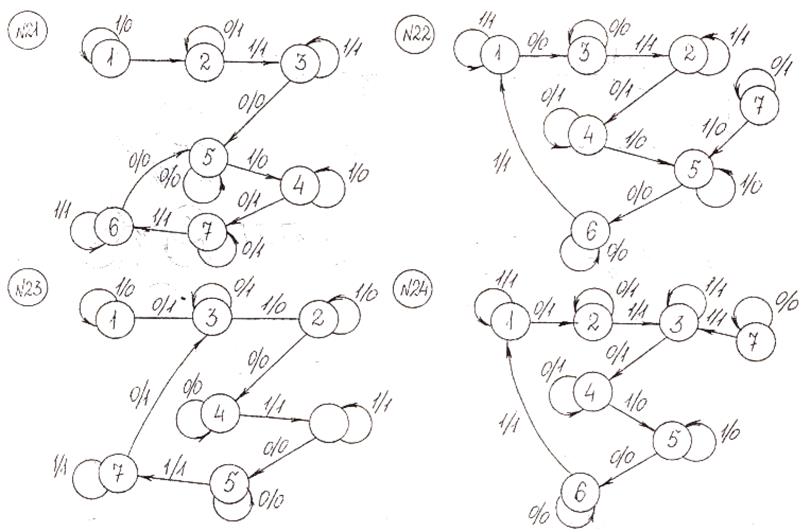
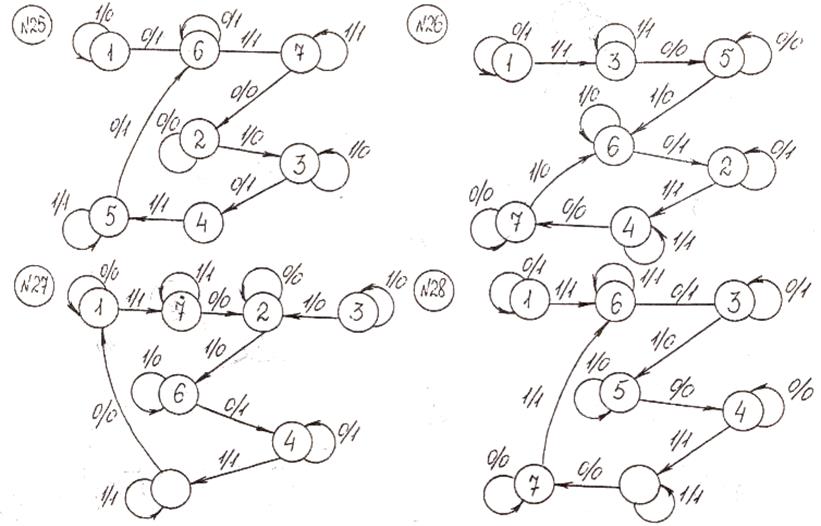
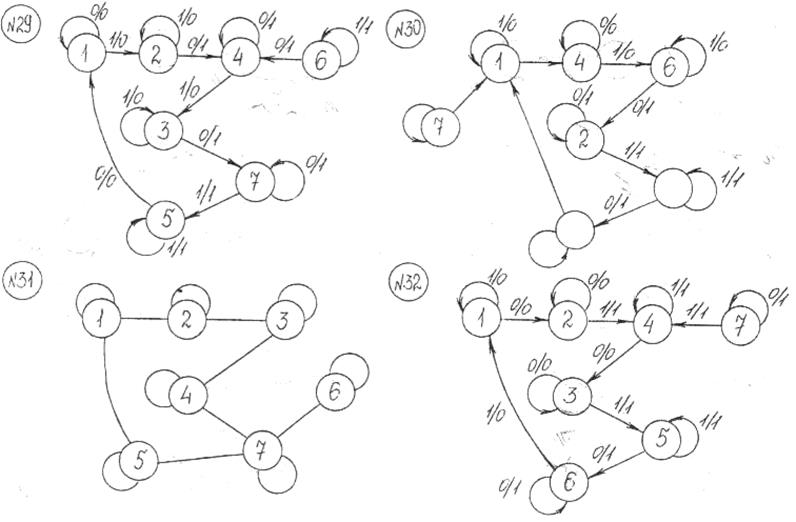
6. ВАРИАНТЫ ЗАДАНИЙ
7. СОДЕРЖАНИЕ ОТЧЕТА
1. Краткое описание заданного метода программной реализации КА, его достоинства и недостатки.
2. Граф переходов КА или его ТП и ТВ.
3. Блок-схема алгоритма и программа своего варианта с комментариями.
СПИСОК ЛИТЕРАТУРЫ
1. СапожниковВ.В. идр. Дискретные устройства железнодорожной автоматики телемеханики и связи / В.В. Сапожников, Ю.А. Кравцов, Вл.В. Сапожников - М.: Транспорт, 1988. - 255 с.
2. ПрограммированиеБИСмикроконтроллераК1-20: Метод, указания к лабораторной работе N2 по дисциплине "Микропроцессорные информационно-управляющие системы на железнодорожном транспорте" /СОСТ. В.М.Чухонин. - СПб: ПИИТ, 1992. - 22 С.
3. Изучениепрограммы "Монитор" микроконтроллераК1-20: Метод, указания к лабораторной работе N1 по дисциплине "Микропроцессорные информационно-управляющие системы на железнодорожном транспорте" / Сост. В.М.Чухонин, В.А.Яковлев, А.В.Дмитриев. -СПб: ПГУПС, 1994. - 43 С.
4. ПрограммнаяреализациякомбинационныхсхемнамикроконтроллереК1-20: Метод, указания к лабораторной работе N3 по дисциплине "Микропроцессорные информационно-управляющие системы на железнодорожном транспорте" / Сост. В.М.Чухонин, В.А.Яковлев. -СПб: ПГУПС, 1995. - 30 с.
Составили: доц. ЧУХОНИН В.М., ассист. ЯКОВЛЕВ В.А. ст. науч. сотр. БУЛАВСКИЙ П.Е.
Редактор м.С. Копяткевич План 1996 г., N 266
Подписано в печать с оригинала-макета 08.04.97. Формат 60 х 84 1/16. Бумага для множ. апп. Печать офсетная. Усл. печ.л. 3,0. Уч.- изд.л. 3.0. Тираж 300.
Заказ ччч. Цена 7100 р. Петербургский государственный университет путей сообщения.
190031, СПб, Московский пр., 9. Типография ПГУПС. 190031, СПб, Московский пр., 9.
ПРОГРАММНАЯ РЕАЛИЗАЦИЯ ПОСЛЕДОВАТЕЛЬНЫХ СХЕМ НА МИКРОКОНТРОЛЛЕРЕ К1-20
Методические указания
Составили: доц. Чухонин В.М., ассист. Яковлев В.А.
Ст. науч. Сотр. Булавский П.Е.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.