








МИНОБРНАУКИ РОССИИ
Государственное образовательное учреждение высшего профессионального образования
«Санкт-Петербургский государственный электротехнический университет
«ЛЭТИ» им. В.И.Ульянова (Ленина)»
(СПбГЭТУ)
|
Факультет ФРТ Кафедра РС Индивидуальное домашнее задание №1 По дисциплине: Цифровые устройства и микропроцессоры На тему: Контроллер имитатора поверхностного сигнала (Код задания 186) |
|
Выполнил |
Оценка __________________ |
|
студент гр. 0105 |
Проверил: Смирнов Б.И. |
|
Евстигнеев Е.А. |
|
|
Дата ____________________ |
|
Санкт-Петербург
2013г
Содержание
Введение.......................................................................................................... 3
1.1 Уточнение ТЗ............................................................................................. 5
1.2 Алгоритм работы контроллера................................................................. 6
1.3 Спецификация входных и выходных сигналов........................................ 9
1.4 Формат пакета управления и пакета ''старт''........................................... 10
1.5 Упрощенная структурная схема........................................................ …..11
1.6 Описание блоков контроллера………………………………………………...12
Список источников информации.................................................................. 14
Введение
LORAN (англ. LongRangeNavigation) — радионавигационная система наземного базирования. Система LORAN была разработана Альфредом Лумисом и широко использовалась кораблями ВМС США и Великобритании в годы Второй мировой войны. В России эксплуатируется система аналогичного назначения, что и Loran-
-C, разработанная в 1958 году по заказу ВВС СССР, получившая название «Чайка».[3][4]

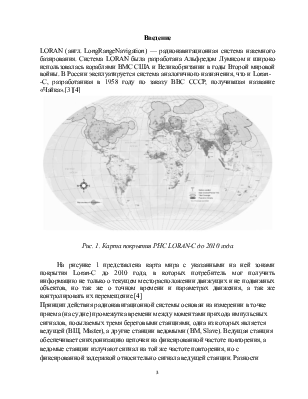
Рис. 1. Карта покрытия РНС LORAN-C до 2010 года
На рисунке 1 представлена карта мира с указанными на ней зонами покрытия Loran-C до 2010 года, в которых потребитель мог получить информацию не только о текущем месторасположении движущих и не подвижных объектов, но так же о точном времени и параметрах движения, а так же контролировать их перемещение.[4]
Принцип действия радионавигационной системы основан на измерении в точке приема (на судне) промежутка времени между моментами прихода импульсных сигналов, посылаемых тремя береговыми станциями, одна из которых является ведущей (ВЩ, Master), а другие станции ведомыми (ВМ, Slave). Ведущая станция обеспечивает синхронизацию цепочки на фиксированной частоте повторения, а ведомые станции излучают сигнал на той же частоте повторения, но с фиксированной задержкой относительно сигнала ведущей станции. Разности расстояний от местоположения судна до радиостанций МY, МW легко найти, если измерить промежутки времени между моментами прихода импульсных сигналов. Геометрическое место точек, имеющее постоянную разность времен(ti – tj) относительно двух точек, в которых расположены излучающие станции (фокусы), определяет линию положения на плоскости - гиперболу. Наличие двух пересекающихся гипербол позволяет получить точку или однозначно определить местоположение судна на поверхности.
Радионавигационный сигнал, отражаясь от ионизированных слоев атмосферы, может прийти в точку приема несколькими путями. Наиболее стабильные сигналы приходят в точку приема, огибая земную поверхность, но с увеличением расстояния имеют наибольшее затухание. Сигналы, отраженные от ионосферы, имеют большую интенсивность на больших расстояниях от станций, но обладают ярко выраженной зависимостью от параметров солнечной радиации.
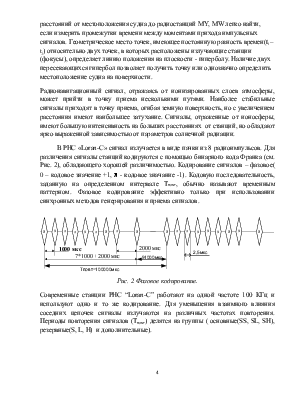
В РНС «Loran-С» сигнал излучается в виде пачки из 8 радиоимпульсов. Для различения сигналы станций кодируются с помощью бинарного кода Франка (см. Рис. 2), обладающего хорошей различимостью. Кодирование сигналов – фазовое( 0 – кодовое значение +1, p - кодовое значание -1). Кодовую последовательность, заданную на определенном интервале Тповт, обычно называют временным паттерном. Фазовое кодирование эффективно только при использовании синхронных методов генерирования и приема сигналов.
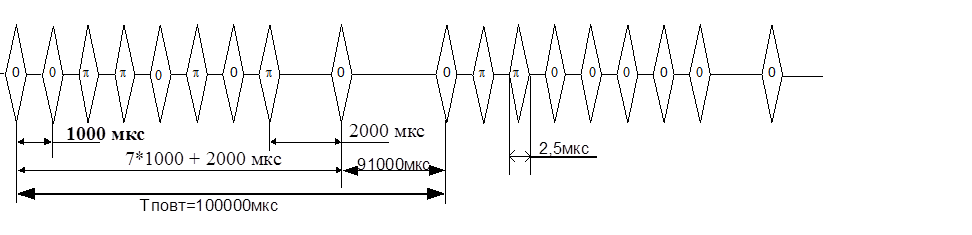 Рис. 2 Фазовое
кодирование.
Рис. 2 Фазовое
кодирование.
Современные станции РНС “Loran-C” работают на одной частоте 100 КГц и используют одно и то же кодирование. Для уменьшения взаимного влияния соседних цепочек сигналы излучаются на различных частотах повторения. Периоды повторения сигналов (Тповт) делятся на группы ( основные(SS, SL, SH), резервные(S, L, H) и дополнительные).
1. Уточнение задания на проектирование.
1.1 Уточнение технического задания.
Структурная схема комплекса.
Целью курсовой работы является разработка контроллера, формирующего сигналы поверхностной волны с возможностью перестройки частоты в пределах заданной основной.
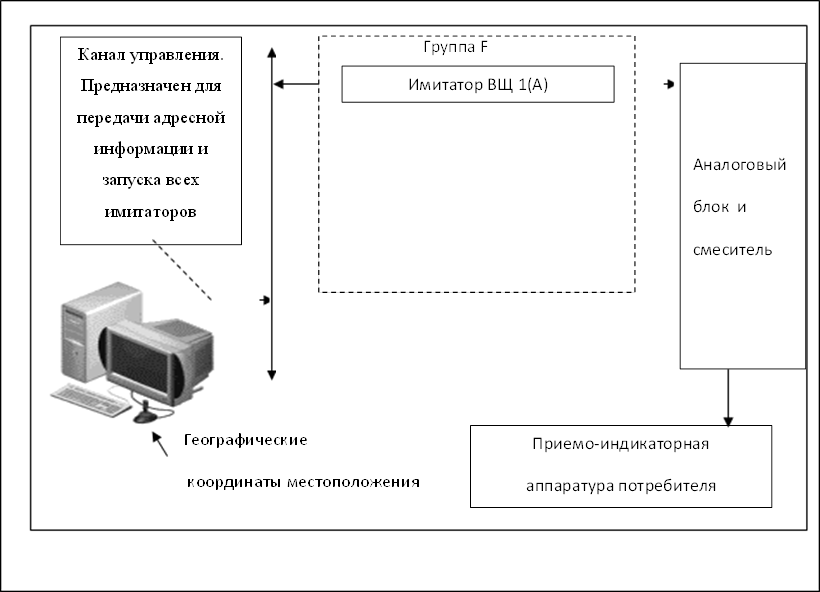 |
Рис. 3 Структурная схема оценочных испытаний радионавигационной аппаратуры.
На рис.3 представлена структурная схема оценочных испытаний радионавигационной аппаратуры. Из данной схемы видно, что каждый имитатор представляет собой самостоятельный котроллер, который имеет вход управления и выход, предназначенный для формирования сигнала.
Каждому контроллеру присвоен индивидуальный номер, которому соответствует заранее заданная основная частота, признак ведущая/ведомая и фазовый код генерируемого сигнала. Эти параметры указываются в задании на курсовой расчет.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.