

Лекция 14
1. Основные возможности и параметры бортовых навигационных комплексов
2. Общие сведения о радиосистемах дальней навигации
Основные возможности и параметры НК определяются его назначением.
Основные задачи, решаемые НК:
1. программирование полета, автоматическое определение места ВС, коррекция полученных методов счисления координат с индикацией вычисленных поправок, комплексная обработка информации, получаемой от датчиков комплекса
2. управление пилотажными индикаторами и плановыми индикаторами навигационной обстановки;
3. формирование и выдача сигналов САУ для обеспечения автоматического пилотирования, автоматического полета по маршруту в любую заданную точку и автоматического или полуавтоматического выполнения
4. предпосадочного маневра;
5. автоматизация предполетного и полетного контроля аппаратуры с выдачей сигналов о неисправности отдельных систем и комплекса в целом;
6. определение времени пролета любого пункта по маршруту и выдача экипажу соответствующей сигнализации, определение и индикация располагаемого времени полета с учетом фактического остатка топлива.
Автоматическое решение этих и других задач позволяет сократить время загруженности экипажа управляющими действиями до 40% от общей продолжительности полета.
Основные параметры НК, согласно существующим требованиям, должны соответствовать следующим значениям:
|
Погрешность счисления координат ВС (2s), % от пройденного пути, при использовании: доплеровского измерителя скорости аэродинамических данных комплексная обработка информации |
2 3 2 |
|
Погрешность индикации места ВС (2s) на плановом индикаторе навигационной обстановки, км: на маршруте в зоне аэродрома |
4 1 |
|
Самолетовождение в коридоре ±5 км с вероятностью 0,95при интервале между коррекциями, км |
250 |
|
Погрешность определения времени прибытия в заданый пункт маршрута (2s), мин |
1,8 |
|
Среднее время наработки наотказ, ч |
300 |
|
Время ввода программы и ее контроля |
15 |
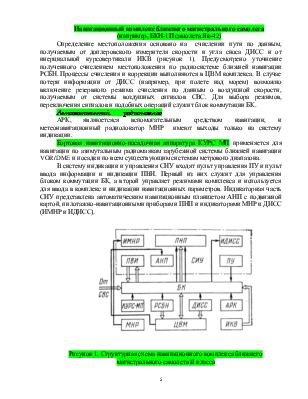
Навигационный комплекс ближнего магистрального самолета
(например, БКН-1П самолета Як-42)
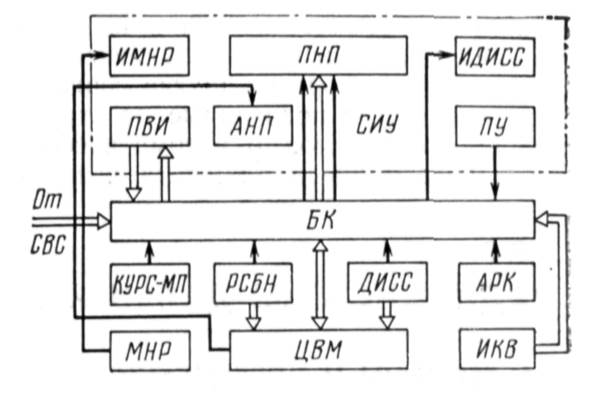
Определение местоположения основано на счислении пути по данным, получаемым от доплеровского измерителя скорости и угла сноса ДИСС и от инерциальной курсовертикали ИКВ (рисунок 1). Предусмотрено уточнение полученного счислением местоположения по радиосистеме ближней навигации РСБН. Процессы счисления и коррекции выполняются в ЦВМ комплекса. В случае потери информации от ДИСС (например, при полете над морем) возможно включение резервного режима счисления по данным о воздушной скорости, получаемым от системы воздушных сигналов СВС. Для выбора режимов, переключения сигналов и подобных операций служит блок коммутации БК.
Автоматический радиокомпас
АРК, являюетсяся вспомогательным средством навигации, и метеонавигационный радиолокатор МНР имеют выходы только на систему индикации.
Бортовая навигационно-посадочная аппаратура КУРС МП применяется для навигации по азимутальным радиомаякам зарубежной системы ближней навигации VOR/DME и посадки по всем существующим системам метрового диапазона.
В систему индикации и управления СИУ входят пульт управления ПУ и пульт ввода информации и индикации ПВИ. Первый из них служит для управления блоком коммутации БК, а второй управляет режимами комплекса и используется для ввода в комплекс и индикации навигационных параметров. Индикаторная часть СИУ представлена автоматическим навигационным планшетом АНП с подвижной картой, пилотажно-навигационными приборами ПНП и индикаторами МНР и ДИСС (ИМНР и ИДИСС).
 |
 |
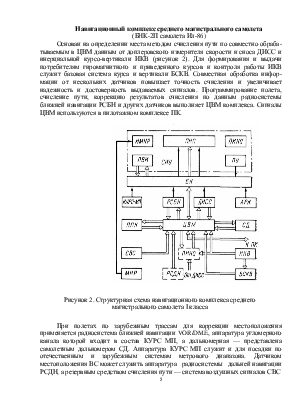
Навигационный комплекс среднего магистрального самолета
(БНК-2П самолета Ил-86)
Основан на определении места методом счисления пути по совместно обрабатываемым в ЦВМ данным от доплеровского измерителя скорости и сноса ДИСС и инерциальной курсо-вертикали ИКВ (рисунок 2). Для формирования и выдачи потребителям гиромагнитного и приведенного курсов и контроля работы ИКВ служит базовая система курса и вертикали БСКВ. Совместная обработка информации от нескольких датчиков повышает точность счисления и увеличивает надежность и достоверность выдаваемых сигналов. Программирование полета, счисление пути, коррекцию результатов счисления по данным радиосистемы ближней навигации РСБН и других датчиков выполняет ЦВМ комплекса. Сигналы ЦВМ используются в пилотажном комплексе ПК.
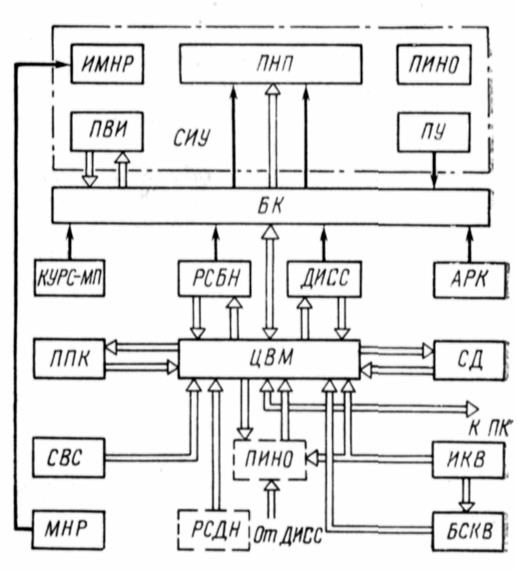

При полетах по зарубежным трассам для коррекции местоположения применяется радиосистема ближней навигации VOR/DME, аппаратура угломерного канала которой входит в состав КУРС МП, а дальномерная — представлена самолетным дальномером СД. Аппаратура КУРС МП служит и для посадки по отечественным и зарубежным системам метрового диапазона. Датчиком местоположения ВС может служить аппаратура радиосистемы дальней навигации РСДН, а резервным средством счисления пути — система воздушных сигналов СВС
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.