а отсчеты фазы будут распределены равномерно в интервале [–p, p].
Если к узкополосному
нормальному процессу x(t)
добавляется детерминированный гармонический сигнал ![]() , то,
как нетрудно показать, у квадратурных компонент результирующего узкополосного
нормального СП появляются средние значения
, то,
как нетрудно показать, у квадратурных компонент результирующего узкополосного
нормального СП появляются средние значения ![]() и
и ![]() соответственно. В соответствии с решением
задачи о распределении модуля и аргумента нормального случайного вектора
отсчеты огибающей и фазы в совпадающие моменты времени будут теперь зависимы.
Отсчеты огибающей будут подчиняться распределению Релея–Райса:
соответственно. В соответствии с решением
задачи о распределении модуля и аргумента нормального случайного вектора
отсчеты огибающей и фазы в совпадающие моменты времени будут теперь зависимы.
Отсчеты огибающей будут подчиняться распределению Релея–Райса:
а отсчеты фазы будут подчиняться распределению
 ,
,
![]() .
.
Вид распределений W(r) и W(Q) зависит от величины параметра  , который можно назвать отношением
сигнал/шум. При h >> 1, заменяя функцию I0(x)
первыми двумя членами определяющего ее степенного ряда (см. гл.6), т. е.,
считая I0(x)
, который можно назвать отношением
сигнал/шум. При h >> 1, заменяя функцию I0(x)
первыми двумя членами определяющего ее степенного ряда (см. гл.6), т. е.,
считая I0(x) при
при ![]() , получим
, получим
При h >> 1 можно воспользоваться асимптотическим представлением функции I0(x) при больших значениях аргумента (см. гл. 4 первой части пособия):
I0(x) = ,
,
где  –
бесконечно малая более высокого порядка малости, чем
–
бесконечно малая более высокого порядка малости, чем ![]() .
Подставляя это выражение в распределение Рэлея–Райса, после несложных преобразований
и перехода к безразмерной переменной
.
Подставляя это выражение в распределение Рэлея–Райса, после несложных преобразований
и перехода к безразмерной переменной  , получим
, получим
 .
.
Таким образом, с точностью до
множителя ![]() распределение Рэлея–Райса при h
>> 1 стремится к нормальному, которое с учетом сделанной замены имеет среднее значение Um и дисперсию s2.
распределение Рэлея–Райса при h
>> 1 стремится к нормальному, которое с учетом сделанной замены имеет среднее значение Um и дисперсию s2.
Хорошо известно, что с
вероятностью 0.997 значения нормальной случайной величины сосредоточены на
промежутке ![]() – правило “трех сигма”. В этой области
поправочный множитель
– правило “трех сигма”. В этой области
поправочный множитель ![]() при h >> 1 мало
отличается от единицы. Убедиться в этом мы просим читателя.
при h >> 1 мало
отличается от единицы. Убедиться в этом мы просим читателя.
![]() На рис. 31
представлен вид распределения Рэлея–Райса при различных значениях параметра h.
На рис. 31
представлен вид распределения Рэлея–Райса при различных значениях параметра h.
Что касается распределения фазы, то при h << 1 оно хорошо аппроксимируется косинусоидальным распределением вида
 ,
, ![]() .
.
При h>> 1 распределение фазы
стремится к нормальному со средним значением j и дисперсией ![]() , т. е.
, т. е.
 ,
, ![]() .
.
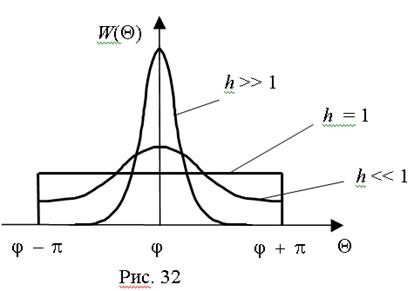 На рис. 32 приведено распределение
На рис. 32 приведено распределение ![]() для различных значений параметра h.
для различных значений параметра h.
Полученные результаты
полезно проиллюстрировать с помощью векторной диаграммы. На плоскости,
вращающейся против часовой стрелки с угловой скоростью w0, детерминированное колебание ![]() можно
представить неподвижным вектором, модуль которого r равен
можно
представить неподвижным вектором, модуль которого r равен ![]() , а
аргумент Q равен
, а
аргумент Q равен ![]() . Квадратурные компоненты этого процесса
постоянны и детерминированы и равны
. Квадратурные компоненты этого процесса
постоянны и детерминированы и равны ![]() и
и ![]() соответственно (см. рис. 33)
соответственно (см. рис. 33)
Для узкополосного нормального процесса квадратурные компоненты будут независимыми нормальными случайными процессами a(t) и b(t), причем длина вектора и его аргумент будут определяться выражениями:
![]() ,
,
 .
.
Рассмотрим вопрос о
стационарности суммы стационарного узкополосного процесса и сигнала ![]() . Если сигнал
. Если сигнал ![]() детерминированный,
т. е Um, w0
и j – детерминированные величины, то
суммарный процесс, оставаясь нормальным, будет нестационарным, так как его
среднее значение
детерминированный,
т. е Um, w0
и j – детерминированные величины, то
суммарный процесс, оставаясь нормальным, будет нестационарным, так как его
среднее значение ![]() будет зависеть от времени. Огибающая
и фаза при этом будут стационарными процессами с распределением мгновенных
значений, приведенным выше.
будет зависеть от времени. Огибающая
и фаза при этом будут стационарными процессами с распределением мгновенных
значений, приведенным выше.
 Если начальная фаза сигнала j является случайной величиной, равномерно
распределенной в интервале [–p, p], то суммарный процесс в предположении
о независимости сигнала и узкополосного нормального процесса, будет
стационарным в широком смысле, так как его среднее значение, равное сумме
средних, будет равно нулю, а корреляционная функция, также равная сумме КФ
слагаемых, будет равна
Если начальная фаза сигнала j является случайной величиной, равномерно
распределенной в интервале [–p, p], то суммарный процесс в предположении
о независимости сигнала и узкополосного нормального процесса, будет
стационарным в широком смысле, так как его среднее значение, равное сумме
средних, будет равно нулю, а корреляционная функция, также равная сумме КФ
слагаемых, будет равна ![]() +
+ , где
, где ![]() – КФ узкополосного процесса, а – корреляционная функция сигнала
– КФ узкополосного процесса, а – корреляционная функция сигнала ![]() , будет зависеть лишь от t.
, будет зависеть лишь от t.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.