Ω1 = 2πf1 / p; Ω2 = πn2 / 30,
где f1 – частота напряжения сети; p – число пар полюсов. При анализе работы асинхронного двигателя используют относительную величину s, называемую скольжением:
s = ΔΩ / Ω1 = (Ω1 – Ω2) / Ω1 = (n1 – n2) / n1 . (7.1)
Следует отметить, что f2 – частота ЭДС, наводимой в обмотках ротора, отличается от частоты питающей сети f1 и равна f2 = pΔΩ / 2π = sf1 .
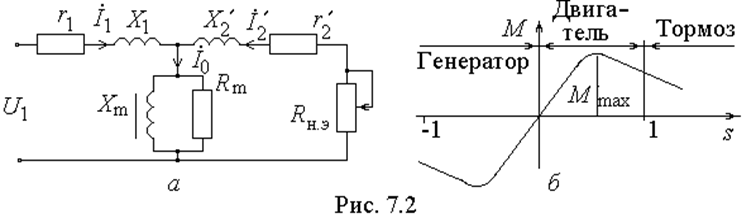
При вращении ротора асинхронный двигатель можно рассматривать как трансформатор обобщенного типа, в котором преобразуются не только напряжения, токи, число фаз, но также частота и род энергии. Уравнениям ЭДС и токов асинхронного двигателя соответствует электрическая эквивалентная схема замещения асинхронного двигателя (рис. 7.2, а), совпадающая с эквивалентной схемой сетевого трансформатора: İ1 + İ´2 = İ0 ; E1 = 4,44f1w1Фвk1о ; E2 = 4,44f2w2Фвk2о = 4,44sf1w2Фвk2о , где E1 и E2 – ЭДС, индуцируемые потоком возбуждения Фв , в обмотках статора E1 и ротора E2 двигателя; k1о и k2о – коэффициенты распределения обмоток статора и ротора (k1о, k2о < 1). Нагрузкой такого трансформатора служит эквивалентное активное сопротивление Rн.э, определяемое механической нагрузкой на валу двигателя: Rн.э = r΄2 (1 – s) / s . Значение электромагнитного момента, развиваемого асинхронным двигателем, определяется выражением: Mэ.м = CмФвI2scos φ2 , где См – механическая постоянная машины.
 |
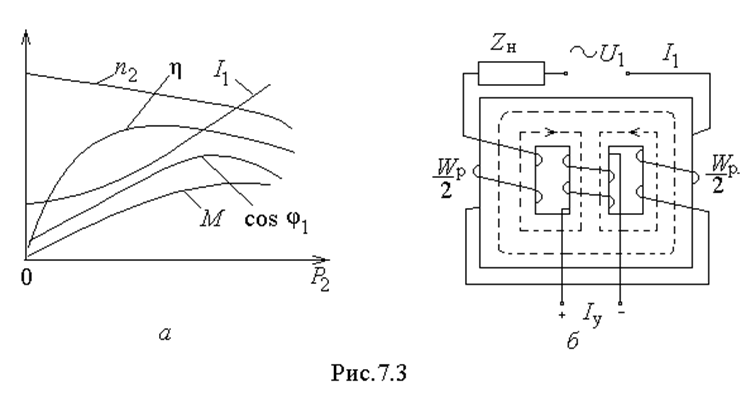 |
Особенностью характеристик асинхронного двигателя является то, что характеристика I1 = f(P2) не выходит из начала координат, так как из-за воздушного зазора на пути магнитного потока Фв двигатель в режиме холостого хода (P2 = 0) потребляет из сети значительный ток холостого хода I0, достигающий 0,5I1н и содержащий большую реактивную составляющую (следовательно, низкий cos φ1).
С возрастанием нагрузки P2 двигателя ток I1 увеличивается за счет роста его активной составляющей, что также объясняет и рост коэффициента мощности cos φ1, достигающий максимального значения вблизи номинального режима.
Описание лабораторного макета
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.