Лабораторная работа № 5
ИССЛЕДОВАНИЕ АСИНХРОННОГО ЭЛЕКТРИЧЕСКОГО
ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА
Цель работы: изучение конструкции, принципа действия статических и динамических характеристик исполнительного двигателя переменного тока.
1. МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Принцип действия. В качестве исполнительных двигателей переменного тока в радиоэлектронных системах управления широко применяются двухфазные асинхронные двигатели. Ротор такого двигателя имеет короткозамкнутую оболочку в виде «беличьей клетки» или тонкостенного стакана из неферромагнитного материала, например, дюралюминия. На статоре двигателя находятся две обмотки - обмотка управления и обмотка возбуждения, электрические оси которых сдвинуты в пространстве относительно друг друга на 90°.
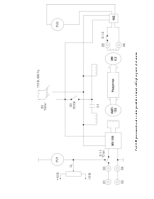
Обмотка управления ОУ подключается к выходу усилителя У следящей системы, обмотка возбуждения ОВ - через фазосдвигающий конденсатор С к сети переменного тока, как показано на рис. 1, для работы двигателя необходимо, чтобы токи в статорных обмотках были сдвинуты по фазе на 90о . Благодаря этому сдвигу токи статорных обмоток создают вращающееся магнитное поле, скорость вращения которого (синхронная скорость) Ω0 определяется частотой f0 питающего напряжения и числом пар полюсов обмоток статора n, т.е.
![]()
Это вращающееся магнитное поле наводит в короткозамкнутом роторе токи, которые, взаимодействуя с вращающимся полем, создают вращающий момент, приводящий ротор двигателя во вращение. При изменении на 180° фазового сдвига (с +90° на -90° и наоборот) между токами статорных обмоток изменяется направление вращения поля и, соответственно, изменяется знак вращающего момента и направление вращения ротора двигателя.
Асинхронный двигатель можно использовать также в качестве тахогенератора переменного тока. Для этого обмотку возбуждения подключают к источнику переменного тока. При вращении ротора в обмотке управление индуцируется Э.Д.С., амплитуда которой зависит от скорости, а фаза - от направления вращения.
Статические характеристики. При исследовании работы электродвигателей используются статические характеристики двух видов: механические характеристики и регулировочная характеристика.
Механической характеристикой двигателя называется зависимость развиваемого двигателем вращающего момента М от скорости вращения ротора Ω. при неизменном управляющем напряжении uу (рис.2).
Регулировочной характеристикой называют зависимость скорости вращения ротора двигателя от управляющего напряжения при номинальном моменте сопротивления Мс (рис.3).
Вращающий момент, возникающий в результате взаимодействия токов в короткозамкнутой обмотке ротора с вращающимся магнитным полем, будет тем больше, чем больше скорость вращения поля относительно ротора. По мере возрастания под действием вращающего момента скорости ротора Ω относительно скорости поля Ω0 - Ω уменьшается, в связи с чем уменьшается и вращающий момент. При Ω0 = Ω вращающий момент становится равным нулю.
Таким образом, для синхронного двигателя всегда Ω0 < Ω и в идеальном случае (в отсутствие момента сопротивления) все механические характеристики должны сходиться в точке Ω0 = Ω. как показано на рис.2. Отставание ротора от поля характеризуется скольжением
![]()
У двигателей, предназначенных для следящих систем, скольжение лежит в пределах η = 0,3 .. 0,5.
В отличие от механических характеристик двигателя постоянного тока. механические характеристики асинхронного двигателя нелинейны. Однако в достаточно узком диапазоне изменения величин uу, Ω, М они могут быть аппроксимированы прямолинейными отрезками, описываемыми выражением:
![]() (1)
(1)
где c1 и с2 - конструктивные постоянные.
В установившемся режиме работы двигателя его вращающий момент уравновешивает момент сопротивления Мс, т.е.
![]()
откуда получаем выражение для регулировочной характеристики асинхронного двигателя
 (2)
(2)
При ![]() и
и
![]() , (3)
, (3)
При
![]() , где
, где  ,
, ![]() - коэффициент передачи двигателя по
скорости:
- коэффициент передачи двигателя по
скорости:
 , В
– напряжение двигателя
, В
– напряжение двигателя
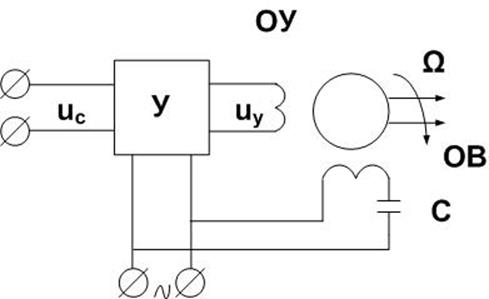
Рис.1. Типовая схема включения двигателя.
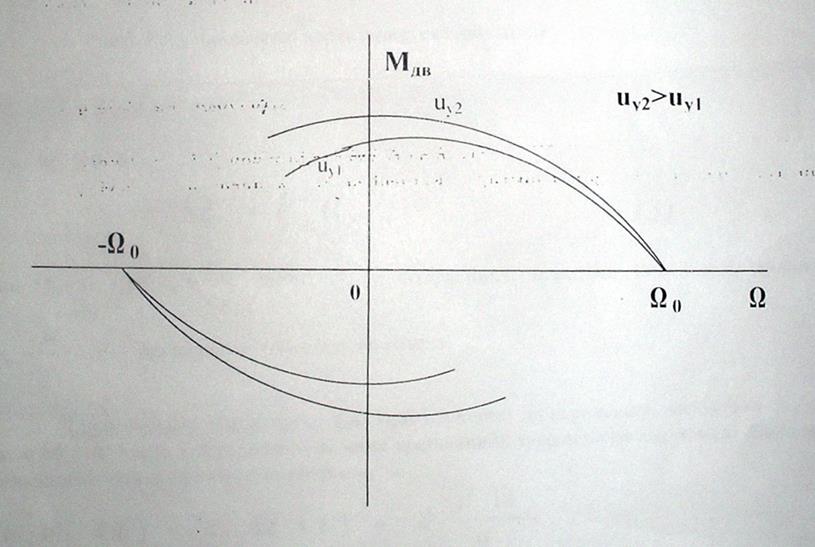
Рис.2. Механические характеристики двигателя.
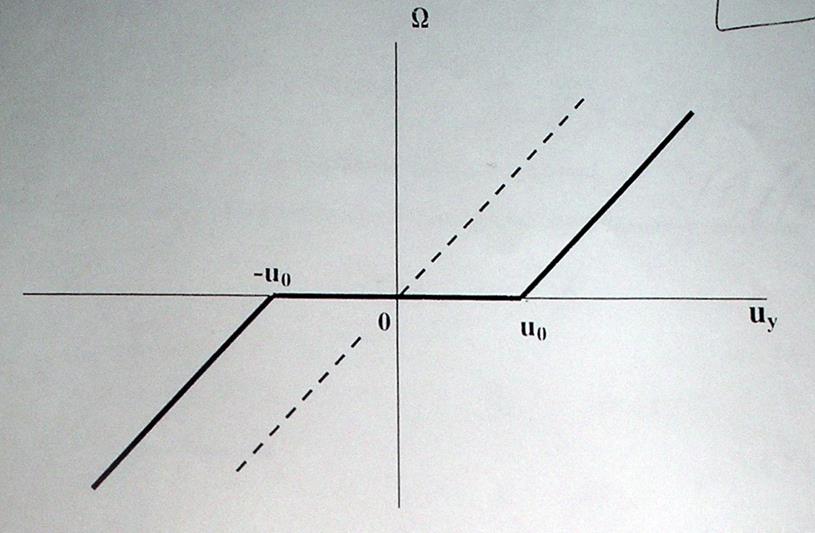
Рис.3. Регулировочная характеристика двигателя
Динамические характеристики. При изучении динамических характеристик двигателя
положим ![]() . Тогда в переходном режиме вращающий
момент, определяемый выражением (1), уравновешивает
лишь момент сил инерции, т.е.
. Тогда в переходном режиме вращающий
момент, определяемый выражением (1), уравновешивает
лишь момент сил инерции, т.е.
 , (4)
, (4)
где I – момент инерции ротора двигателя и других вращающихся масс, приведенных к валу двигателя.
Из (4) получим дифференциальное уравнение двигателя
или
где  - электромеханическая
постоянная времени двигателя.
- электромеханическая
постоянная времени двигателя.
Из (5) получим передаточную функцию и частотные характеристики двигателя:
 (6)
(6)
и, полагая p = jω;
 , (7)
, (7)
![]() (8)
(8)
Таким образом, по виду динамических характеристик асинхронный исполнительный двигатель является апериодическим звеном первого порядка.
При исследовании работы исполнительного двигателя в составе следующей системы представляет интерес зависимость угла поворота выходной оси редуктора двигателя υ(t) от управляющего напряжения uy(t).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.