Технологические расчёты
Согласно технологической схеме модернизации картофелеуборочной машины (Рис. 2) предложены ротационные ворошители взаимодействующие с клубненосным слоем почвы и испытывающего сопротивление которое подвергает вал ворошителя деформациям изгиба и кручения.
Усилие сопротивления почвы при взаимодействии пружинных пальцев ворошитлея с почвой исходя из схемы взаимодействие пальцев с почвой (Рис. 3) по формуле Горячкина.
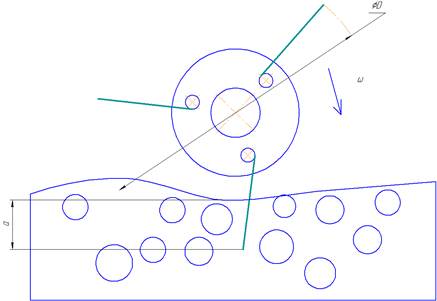
Рисунок – расчётная схема
![]()
где a=0,1М – глубина вхождения пальцев в слой почвы;
Принимаем суглинистые почвы с удельным сопротивлением ![]() ;
;
n=7 – количество пальцевых дисков.
Тогда ![]()
Момент на вал ворошителя определится по формуле:

мощность на привод ворошителей определится по формуле:
![]()
где Р=0,4kH – делится на привод ворошителя,
V=1.67![]() -
окружная скорость ворошителей,
-
окружная скорость ворошителей,
n=2 – количество ворошителей на машине;
тогда ![]()
Определение тягового сопротивления кортофелеуборочной машины. Привод к сепарирующим элеваторам и ворошителям машины осуществляется от вала отбора мощности трактора.
При работе агрегата с приводом рабочих органов от вала отбора мощности трактора определяют приведённое тяговое сопротивление по формуле:
![]() ;
;
где Rтяг – тяговое сопротивление рабочих органов не приводимых в действие от вала отбора мощности.
Rвом – сопротивление рабочих органов приводимых от вала отбора мощности трактора.
Тяговое сопротивление определяется по формуле:
![]()
где Вк = 1,4 м – рабочая ширина захвата машины,
к = 5 ![]() - удельное сопротивление
картофелеуборочных машин.
- удельное сопротивление
картофелеуборочных машин.
Тогда ![]()
Сопротивление рабочих органов приводимых от вала отбора мощности определяется по формуле:
где ![]() - мощности привода
рабочих органов с учётом привода предполагаемых ворошителей,
- мощности привода
рабочих органов с учётом привода предполагаемых ворошителей,
![]() - рабочая скорость машины,
- рабочая скорость машины,
![]() - коэф. полезного действия
трансмиссии трактора,
- коэф. полезного действия
трансмиссии трактора,
![]() - коэф. Полезного действия
механизма привода ВОМ.
- коэф. Полезного действия
механизма привода ВОМ.
Тогда 
И так ![]()
Конструктивные расчёты
В процессе взаимодействия ворошителей с клубненосным слоем их пальцы подвергаются деформации изгиба. Следовательно требуемый диаметр пальцев определим из условия прочности изгиба:
![]() - допускаемое напряжение при
изгибе;
- допускаемое напряжение при
изгибе;
![]() - максимальный изгибающий момент
пальца;
- максимальный изгибающий момент
пальца;
W – момент сопротивления сечения пальца.
Максимальный изгибающий момент пальца ![]() , определяется по формуле:
, определяется по формуле:
![]()
где  - усилие сопротивления
почвы пальцу ворошителя (см. рис.)
- усилие сопротивления
почвы пальцу ворошителя (см. рис.)
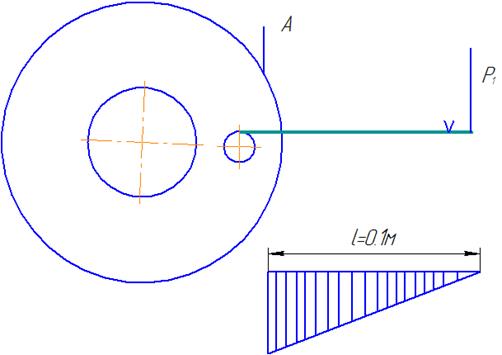
Рисунок – схема к определению изгибающего момента
И так ![]()
Принимая, что наиболее приемлемая форма сечения пальца круг,
тогда может сопротивление сечения имеет вид: ![]() ;
;
Допускаемое напряжение изгибу для стали ст.20 определи исходя из значения предела текучести для стали 20 а коэффициента запаса прочности по формуле:

где ![]() - предел текучести для
стали Ст.20;
- предел текучести для
стали Ст.20;
n=2 – коэффициент запаса прочности;
тогда 
следовательно
из уравнения момента сопротивления сечения определим диаметр пальца:
Принимаем с учётом цикличности нагрузки d=6мм.
Согласно сортаменту 
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.