МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
КРАСНОЯРСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ
ЦВЕТНЫХ МЕТАЛЛОВ И ЗОЛОТА
Кафедра АПП
Группа АМЦ – 98 – 2
Дисциплина АТТП
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА № 1
Расчет линейной одноконтурной АСР
при возмущении по нагрузке.
Вариант № 23
Проверил И.И. Лапаев
Выполнил студент М.М. Буженко
Красноярск 2002 г.
Министерство образования Российской Федерации
КРАСНОЯРСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ
ЦВЕТНЫХ МЕТАЛЛОВ И ЗОЛОТА
Кафедра АПП
Дисциплина АТТП
Группа АМЦ – 98 – 2 Студент Буженко М.М.
ЗАДАНИЕ
ПО РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЕ № 1
Определить динамическую характеристику отражательной печи для плавки медных концентратов по экспериментальным данным:
|
Р,Па |
8 |
8 |
8,07 |
8,2 |
8,28 |
8,5 |
8,7 |
8,78 |
8,84 |
8,9 |
8,98 |
9,08 |
9,11 |
9,13 |
9,15 |
9,18 |
9,18 |
|
t,сек |
0 |
2 |
3 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
22 |
24 |
26 |
28 |
30 |
При Хвх=11% ХРО
Дата выдачи задания “14” февраля 2002г.
Руководитель работы ______________ И.И. Лапаев
Расчет линейной одноконтурной АСР при возмущении по нагрузке.
Любой расчет АСР начинается с составления математического описания объекта управления, при котором определяются его статические (коэффициент усиления - Коб) и динамические (запаздывание - t, постоянные времени – Т) параметры.
Расчет ведется при максимальном внешнем возмущающем воздействии, в данном случае DХВХ = 11% ХРО (процентов хода регулирующего органа).
Для расчета АСР используется программный продукт Mathcad.
Найдем отклонение регулируемой величины ∆ Р, Па, данные сведены в таблицу 1.
Определяется единичная D Р 0(t) и нормированная D Р Н(t) переходные функции:
D Р 0(t) = D Р (t) / А,
D Р Н(t) = D Р 0(t) / D Р 0(Ту),
где А – скачкообразное возмущающее воздействие, при котором снята переходная характеристика (А = 11% ХРО);
∆Р0(Ту) – установившееся значение переходной характеристики.
Результаты сведены в таблицу 1.
Таблица 1 – Ординаты переходных функций
|
t, сек |
0 |
2 |
3 |
4 |
6 |
8 |
10 |
12 |
|
P(t), Па |
8 |
8 |
8,07 |
8,2 |
8,28 |
8,5 |
8,7 |
8,78 |
|
∆P(t), Па |
0 |
0 |
0,07 |
0,2 |
0,28 |
0,5 |
0,7 |
0,78 |
|
∆P0(t), Па |
0 |
0 |
0,006364 |
0,018182 |
0,025455 |
0,045455 |
0,063636 |
0,070909 |
|
∆Pн(t), Па |
0 |
0 |
0,059321 |
0,16949 |
0,237285 |
0,423724 |
0,593213 |
0,661009 |
Продолжение таблицы 1 – Ординаты переходных функций
|
t, сек |
14 |
16 |
18 |
20 |
22 |
24 |
26 |
28 |
|
P(t), Па |
8,84 |
8,9 |
8,98 |
9,08 |
9,11 |
9,13 |
9,15 |
9,18 |
|
∆P(t), Па |
0,84 |
0,9 |
0,98 |
1,08 |
1,11 |
1,13 |
1,15 |
1,18 |
|
∆P0(t), Па |
0,076364 |
0,081818 |
0,089091 |
0,098182 |
0,100909 |
0,102727 |
0,104545 |
0,107273 |
|
∆Pн(t), Па |
0,711856 |
0,762703 |
0,830499 |
0,915243 |
0,940667 |
0,957616 |
0,974565 |
0,999988 |
Окончание таблицы 1 – Ординаты переходных функций
|
t, сек |
30 |
|
P(t), Па |
9,18 |
|
∆P(t), Па |
1,18 |
|
∆P0(t), Па |
0,107273 |
|
∆Pн(t), Па |
0,999988 |
Графическое отображение таблицы 1 представлено на рисунках: рисунок 1 – график возмущающего воздействия и кривая разгона объекта – давление газа в печи; рисунок 2 – единичная и нормированная переходные характеристики.
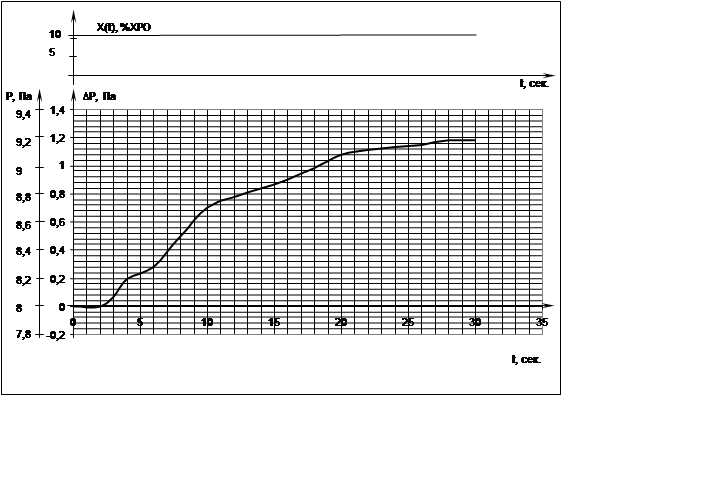 |
Рисунок 1 – График возмущающего воздействия X(t) и кривая разгона объекта Р(t)
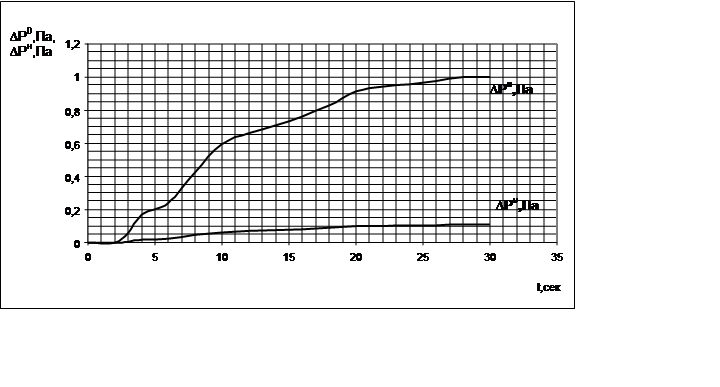
Рисунок 2 - Переходные характеристики: единичная и нормированная
Из зависимости ∆Рн(t) находим величину коэффициента усиления объекта Коб:
![]()
При аппроксимации объекта последовательным соединением апериодического звена и звена запаздывания определяем его динамические характеристики:
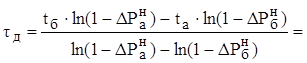
 (сек.)
(сек.)
![]() (сек.)
(сек.)
III. постоянная времени
 (сек.)
(сек.)
Таким образом, передаточная функция объекта имеет вид:

Для определения точности аппроксимации экспериментальной переходной функции решением дифференциального уравнения первого порядка с запаздывающим аргументом рассчитываем ординаты аппроксимирующей кривой:
Для нахождения среднеквадратичной аппроксимации вычислим отношение:
Результаты сводим в таблицу 2.
|
t, сек |
0 |
2 |
3 |
4 |
6 |
8 |
10 |
12 |
|
∆Pн(t)Па |
0 |
0 |
0,059321 |
0,16949 |
0,237285 |
0,423724 |
0,593213 |
0,661009 |
|
|
0 |
0 |
0 |
0 |
0,147682 |
0,314326 |
0,448387 |
0,556238 |
|
dа1 |
0 |
0 |
0,003519 |
0,028727 |
0,008029 |
0,011968 |
0,020975 |
0,010977 |
|
t, сек |
14 |
16 |
18 |
20 |
22 |
24 |
26 |
28 |
|
∆Pн(t)Па |
0,71186 |
0,762703 |
0,830499 |
0,915243 |
0,940667 |
0,957616 |
0,974565 |
0,999988 |
|
|
0,64300 |
0,712801 |
0,768954 |
0,814127 |
0,850469 |
0,879705 |
0,903225 |
0,922146 |
|
dа1 |
0,00474 |
0,00249 |
0,003788 |
0,010225 |
0,008136 |
0,00607 |
0,00509 |
0,00606 |
|
t, сек |
30 |
|
∆Pн(t)Па |
0,99999 |
|
|
0,93737 |
|
dа1 |
0,00392 |
На рисунке 3 показана аппроксимирующая и нормированная переходные характеристики.
Рисунок 4 – Переходная характеристика при аппроксимации решением дифференциального уравнения первого порядка
Используя данные таблицы 2, рассчитаем среднеквадратичную ошибку аппроксимации:

Вывод:
В результате проделанной работы были найдены динамические характеристики
технологического процесса, а также аппроксимирован объект регулирования с
помощью апериодического звена и звена чистого запаздывания. Найденная ошибка
аппроксимации является достаточно большой (![]() ),
следовательно, необходимо осуществлять аппроксимацию объекта последовательным
соединением двух апериодических звеньев и звена запаздывания (решением
дифференциального уравнения второго порядка с запаздывающим аргументом).
),
следовательно, необходимо осуществлять аппроксимацию объекта последовательным
соединением двух апериодических звеньев и звена запаздывания (решением
дифференциального уравнения второго порядка с запаздывающим аргументом).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.