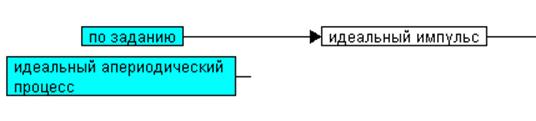
Отсоедините блоки «идеальныйапериодическийпроцесс» и «идеальныйимпульс» и соедините блок «позаданию» с блоком «идеальныйимпульс» (рис. 34).
|
|
|
Рис. 34. Анализ системы при воздействию по заданию |
Войдите в блок «позаданию» нажатием на нем правой кнопкой мыши (рис. 35), установите характеристики идеального переходного процесса (амплитуду в строке Amplitude и время запаздывания в строке TimeDelay).
|
|
|
Рис. 35. Уровень диаграммы для создания идеального переходного процесса при воздействии по заданию |
|
|
|
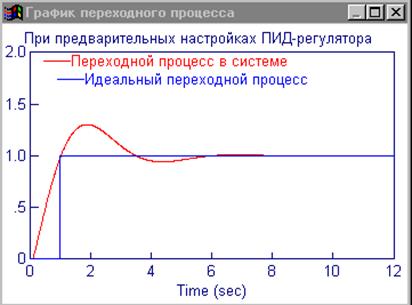
Рис. 36. График переходного процесса при воздействии по заданию |
Выйдите из этого подуровня диаграммы нажатием правой кнопкой мыши на свободном поле диаграммы. Установите настройки ПИД-регулятора. Запустите моделирование, результаты моделирования на рис. 36.
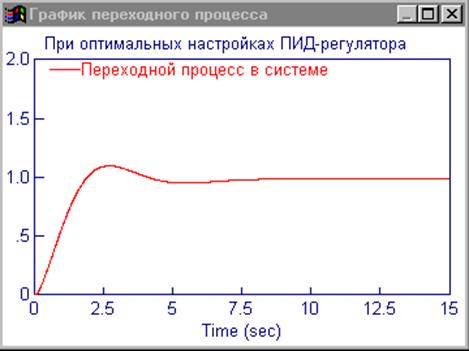
Проведите оптимизацию. Установите флаг в строке PerformOptimization меню OptimizationSetup (рис. 25). Запустите моделирование, переходной процесс с оптимизированными настройками регулятора показан на рис. 37.
|
|
|
Рис. 37. График переходного процесса с оптимальными настройками регулятора |
16. По данным табл. 2 в соответствии с вариантом задайте свою передаточную функцию в блоке Transfer Function, задайте единичное возмущение по нагрузке. Задайте исходные настройки ПИД-регулятора рассчитанные по приближенным формулам, приведенным в табл. 1. Проведите моделирование. Проведите оптимизацию настроек ПИД-регулятора, добейтесь приемлемого качества регулирования. Задайте возмущение по заданию. Проведите моделирование, а затем оптимизацию.
Отчет по лабораторной работе в формате Word должен содержать 4 графика ПП с настройками регулятора: при возмущении по нагрузке до и после оптимизации, при возмущении по заданию до и после оптимизации.
Таблица 2
|
№ варианта |
Параметры объекта регулирования |
|||
|
Коэффициент |
Постоянные времени |
Запаздывание |
||
|
T1об, с |
T2об, с |
|||
|
1 |
0,9 |
24 |
8 |
5 |
|
2 |
1,1 |
23 |
7 |
3 |
|
3 |
5,2 |
55 |
17 |
12 |
|
4 |
3,5 |
21 |
7 |
4 |
|
5 |
0,6 |
6,2 |
1,8 |
1,6 |
|
6 |
2,7 |
23 |
10 |
11 |
|
7 |
75 |
14 |
5 |
12 |
|
8 |
8 |
35 |
11 |
10 |
|
9 |
2,4 |
17 |
6,3 |
5,5 |
|
10 |
12 |
19,5 |
4,7 |
2,2 |
|
11 |
16 |
31 |
9,6 |
10 |
|
12 |
32 |
17 |
4,3 |
3,5 |
|
13 |
1,8 |
37 |
10 |
16 |
|
14 |
5,4 |
6,4 |
2,2 |
1,5 |
|
15 |
6,1 |
21 |
7,4 |
4,2 |
|
16 |
2,3 |
38 |
27 |
15 |
|
17 |
0,6 |
31 |
12 |
6 |
|
18 |
1,2 |
22 |
6,8 |
13 |
|
19 |
5,1 |
5 |
15 |
11 |
|
20 |
3,3 |
23 |
0,8 |
0,55 |
|
21 |
6,5 |
6,4 |
17 |
18 |
|
22 |
3,0 |
25 |
11 |
12 |
|
23 |
7 |
15 |
6,1 |
3,6 |
|
24 |
9 |
37 |
13 |
21 |
|
25 |
2,2 |
17,6 |
7,3 |
5,8 |
|
26 |
12 |
23 |
7 |
10 |
|
27 |
5,9 |
15 |
9 |
11 |
|
28 |
3,3 |
23 |
8 |
0,9 |
|
29 |
6,5 |
6,4 |
1,7 |
0,8 |
|
30 |
7,3 |
19 |
8 |
4,2 |
Контрольные вопросы
1. Назначение и возможности VisSim 3.0.
2. Правила монтажа блоков.
3. Работа со сложными блоками.
4. Возможности блока Plot.
5. Порядок расчета одноконтурных САР в VisSim 3.0.
6. Расчет оптимальных параметров настройки регулятора при возмущении по нагрузке объекта регулирования.
7. Расчет оптимальных параметров настройки регулятора при возмущении по заданию регулятору.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.