- Метод ЛСП с пересчетом, - Локальный случайный поиск по наилучшей пробе, - ЛСП по статическому градиенту, - Глобальный поиск с независимым выбором плотности распределения пробных шагов.
Достоинство: требует меньшего объема информации. Недостаток: быстродействие хуже, точность хуже (в некоторых случаях).
Инвариантные системы.
Задача всех АСР заключается в следующем: необходимо точно воспроизводить задание на выходе системы.
В статическом режиме точность системы можно повысить , увеличивая коэффициент передачи системы , либо увеличивая порядок астатизма системы. В свою очередь повышение коэффициента передачи системы приводит к уменьшению запаса устойчивости и увеличению колебательности, т.е. точность в переходном режиме уменьшается. Это противоречие между точностью в переходном режиме и установившемся необходимо решить . Оно решается с помощью введения управляющего воздействия по возмущению.
Система, у которой использовано два принципа управления по заданию и по возмущению называется комбинированной.
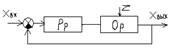
Z-помеха, учитывается, идет на вход регулятора .
Инвариантность заключается в следующем: В системах стабилизации необходимо добиться независимости выходной величины от возмущающего воздействия (помехи ).
В следящих системах необходимо добиться независимости сигнала ошибки от задающего воздействия .
Математическое определение условий независимости получили название теории инвариантности .
Теоремы Лапласа.
1) Теорема подобия f(at)=F(p/a)/a
2)Теорема смещения. eat*f(t)÷F(p-a)
3)Теорема запаздывания. f(t-τ)÷e-pτ·F(p)
4)Дифференцирование оригинала.
fn(t)=pn ·F(p)-pn-1 ·F(0)-pn-2 ·F/(0)-…-Fn-1(0)
5) Интегрирование оригинала. ∫f(τ)dτ от0доt÷F(p)/p
6)Дифференцирование изображения. tn·f(t) ÷ (-1)nFn(p)
6)Теорема о нач. знач-ии ориг-ла. lim pF(при p→∞)=f(0)
7) Интегрирование изображения f(t)/t÷∫F(p)dp от0до∞.
8) Теорема умножения. F(p)Ф(p)÷∫f(τ)φ(t-τ)dτ от0доt
9) Интеграл Дюамеля. pF(p)Ф(p)÷f(t)·φ(0)+∫f(τ)·φ’(t-τ)dτ от0доt
Дискретное преобразование Лапласа. Теоремы:
1) Теорема линейности. Если реш. ф-я f[n] -линейная комбинация реш-тых ф-ий, то изображение линейной комбинации решетчатых функций равно линейной комбинации их изображений.
2) Теорема сдвига. f[n-k]÷e-qk F*(q).
3) Теорема смещения. ean·f[n]÷F*(q-a)
4) Теорема об изображении разностей.
Первую разность реш. Ф-иинаходят по формуле: ∆f[n]÷f[n+1]-f[n],применив теоремы линейности и сдвига, получим ∆f[n]÷e^q [F*(q)-f[0]]-F*(q). Для второй разности реш. функции ∆2f[n]÷f[n+1]-∆f[n] получим
![]()
![]()
5) Теорема об изображении суммы.
6) Теорема об умножении изображений (теорема свертывания в вещественной области). Если реш. ф-ии f[n] и f[r], то свёрткой будет их сумма, т.е. операции свертывания решетчатых функций соответствует простое перемножение изображений.
![]()
7) Теорема о начальном значении оригинала решетчатой функции. f[0,ε]=lim F*(q,ε) при q→∞. Т.е. нач знач-е реш ф-ии равно ее дискр изоб-ию при q→∞.
8) Теорема о конечном значении оригинала решет. функции. lim f[n,ε] при n→0 = lim (eq -1)F*(q,ε) при q→0
9) Теорема о дифференцировании изображения дискретного преобразования Лапласа.
n[m] / m!=(n(n-1)…(n-m+1)) / m! ÷ eq / ((eq -1)m+1)
Разностные ур-я. (1 и 2-го порядков):
n÷eq/(eq -1)2, n2÷eq (eq +1) / (eq -1)3.
|
f(t) |
F(p) |
f(t) |
F(n,ε); z=eq |
|
1 |
1/p |
1 |
z/(z-1) |
|
C |
C/p |
e-an |
z/z-e-a |
|
t |
1/p2 |
1-e-an |
z/(z-1) - ze-a/z-e-a |
|
tn |
n!/pn+1 |
||
|
δ(t) |
1 |
||
|
eat |
1/(p-a) |
||
|
tneat |
n!/(p-a)n+1 |
||
|
sin at |
a/(p2+a2) |
||
|
cos at |
p/(p2+a2) |
||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.