В настоящей работе с помощью формирования импульсных воздействий, подаваемых на вход интегрального исполнительного механизма с постоянной скоро стью вращения его выходного вала, решается задача эффективного управления описанным здесь ТП
В состав АИР входят
реальное дифференцирующее устройство,
|
|
идентификатор вре мени т ПЗ (оценка времени ПЗ на j-m шаге управления
'^оц/7»
идентификатор коэффициента передачи объекта ky (оценка коэффициента передачи объекта на j-m шаге управления ^oiy)>
импульсный модулятор - формирователь импульсов включения интегрального исполнительного механизма с временем включения At, на 7-м шаге управле ния,
Реальное дифференцирующее устройство с выходным сигналом xi(?) удовлетворяет дифференциальному уравнению Tdx\(t) + л, (?) = x'(t) где Г,/ « т , x\t) - производная выходного сигнала датчика температуры
|
|
Идентификатор времени ПЗ оценивает это время по информации о текущих значениях координат s(t) и л(г) Идентификатор коэффициента передачи объекта оцени вает этот коэффициент по информации о текущих зна чениях x(t^) и величинах линейной комбинации управ ления Мд(?,), определившей сигнал x(t) Формирователь дискретных значений линейной комбинации на 7 м шаге управления удовлетворяет уравнению
мл(r^)Ve(r)+^<^.,xl(r)] ^^ощ 05тд,„ </^ <т„ц,,
где s(r) = g(t) - x(t), x\(t) - выходной сигнал дифференциатора, ku] и k^ - оптимизируемые параметры регуля тора на 7-м шаге управления
Дискретные значения моментов времени t, задаются временным квантователем, работающим по информа ции о Тоц, При этом время квантования t^ = ?j r/1 = =Гтоц„КГ<1,5
Импульсный модулятор преобразует дискретные зна чения u(t^) в длительность импульса Л?, = k,u„(t^) k > 0, который подается в моменты времени ^ = Е?кв| (/ = 1> 2 3, ), задаваемые временным квантователем
На рис 2 показана блок схема адаптивного им пульсного регулятора АИР
На рисунках 3 6 приведены результаты моделиро вания работы системы стабилизации температуры теп поносителя теплоцентрали с ПИ регулятором и с АИР Объект описывается уравнением (1), в котором л = 2, 6 <
< т < 8 с, Х;- - ^ = Т = 0,3 с, 1 <ky < 2 5 Время моде
лирования 60 с
|
|
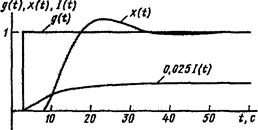
На рис 3 изображена работа системы с постоянными параметрами объекта т = б с, ky ~ 1 с оптимально на строенным в смысле критерия (2) ПИ регулятором при ступенчатом задающем воздействии g(t), ошибке регулирования е(г), текущем значении критерия I(f) Конеч ное значение кри терия /(60) = 13,3 fW,!((t),i(t}
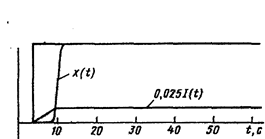
На рис 4 по ,1. ^sw казана работа системы с теми же параметрами объекта и АИР Регулятор настроен оптималь
НО в смысле кри- Рис 4 Адаптивный импульсный регу терия (2) Ко- лятор ступенчатое задающее воздеи нечное значение ствие g(i) (т = 6 с ky = 1)
|
критерия /(60) = 6,9. При постоянных параметрах объекта контуры идентификации и адаптации не работают; регулятор работал с постоянными параметрами и при этом критерий отработки задающего воздействия на 48 % был лучше критерия при ПИ управлении. Рис. 5 иллюстрирует работу ПИ |
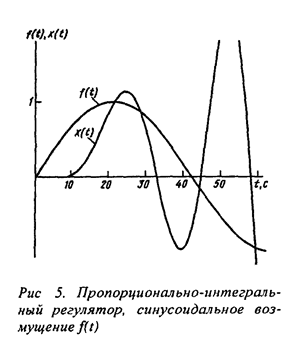
системы при максимальных значениях параметров ооъ-екта из указанного диапазона: т = 8 с, kg == 2,5 и прежних настройках. Как видно из рис. 5, система потеряла устойчивость, т.е. система негруба к изменению параметров объекта.
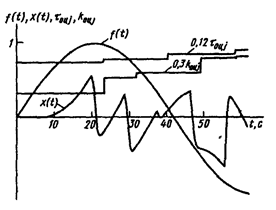
На рис. 6 представлена работа системы с АИР. В процессе моделирования параметры объекта управления увеличивались во всем диапазоне по линейному закону. На рис. 6 изображены синусоидальное возмущающее воздействие ДО» ошибка регулирования e(t)(Jc(0), оценки времени запаздывания Тощ и коэффициента передачи объекта <:оцг- Из этого рисунка видно, что идентификаторы системы отслеживают изменения параметров объекта, гарантируя не только устойчивость, но и высокое качество процесса управления.
Из результатов моделирования следует, что во всех случаях работа АИР обеспечивает более высокое качество управления как при постоянных, так и переменных параметрах объекта управления. Кроме того, надо отметить, что для рассматриваемого ТП (теплоцентраль) реализация ПИ регулятора представляет собой последо
|
вательное соединение ПД регулятора с ШИМ модулятором, управляющим интегральным электроприводом регулирующего клапана. При отработке задающего и возмущающего воздействий ШИМ модулятор имеет большое число включений члектпо- |
|
|
|
р;(с. 6 Адаптивный импульсный регулятор, синусоидальное возмущение f(t) (6 S т <. 8 с; 1 < ^ ^ 2,5) |
привода, в то время как в предлагаемом АИР число включений равно 1 для ступенчатого воздействия либо на порядок меньше числа включений при ПИ регуляторе. Таким образом, в АИР сочетаются высокое качество регулирования и значительное повышение ресурса работы исполнительного механизма клапана.
Работа выполнена в Институте проблем управления РАН. Контактный телефон (095) 334-88-81
Список литературы
1. Smith O.J.M. A Controller to Overcome Dead Time // ISA Journal. 1959. Vol. 6. № 2.
2. Goromaru Т., Yonewwa Y., Hamafusa H. Quasi-Time Optimal Control // Systems and Control. 1975. Vol. 19. №12.
3. Nielsen G. Control of Systems With Time Delay: Proc. VI-th IFAC Congress. Warszawa. 1969. Vol. 4.
4. Гурецкий X Анализ и синтез систем управления с запаздыванием. М.: Машиностроение, 1974.
5. Динамические характеристики объектов регулирования // Тр. конф. Общества приборостроителей. М.:
Изд-во иностр. лит., 1969.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.