УДК681 515
А.М. ШУБЛАДЗЕ д-р техн. наук, С.В. ГУЛЯЕВ канд. техн. наук
Адаптивные импульсные регуляторы для нестационарных объектов с преобладающим запаздыванием
Приводятся результаты моделирования систем управления с обычным ПИ регулятором и разработанным в Институте проблем управления РАН адаптивным импульсным регулятором (АИР). Эти результаты показывают существенное преимущество созданного регулятора в сравнении с известным при управлении объектами с преобладающим запаздыванием (ПЗ).
Some simulation results for the systems with conventional PI controller and with adaptive pulse controller developed in the Institute of Control Sciences of the Russian Academy of Sciences are presented Those results expose the considerable advantage of the developed controller in comparison with conventional one while controlling the systems with prevalent delay.
К часто встречающимся проблемам автоматизации промышленных объектов относится управление нестационарными апериодическими объектами с ПЗ Поведение таких объектов описывается дифференциальным уравнением вида
![]()
1=2
гае a,, kg и т- переменные параметры, причем а, удовлетворяют уравнению
![]()
1=2 i=l
Здесь все \, - действительные положительные числа, часть из которых (не исключено, что и все) может совпадать
|
|
В уравнении (1)
п
^^'<Т; 0<komm<ko<l<•om^<':o^ О < Т^п < т < Ч^ах < °°> 1=1
x(t) - регулируемая координата; u(t) - управляющее воздействие,^^ - неконтролируемое внешнее возмущение, т - время запаздывания; ky — коэффициент передачи объекта.
Предполагается, что имеется информация только о регулируемой координате x(t)
К подобного рода объектам относятся, например, технологические процессы (ТП) в теплоэнергетике, где требуется стабилизировать температуру горячей воды на ее входе в городскую теплоцентраль.
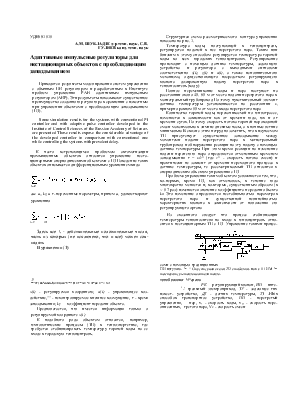
Структурная схема рассматриваемого контура управления показана на рис. 1.
Температура воды, поступающей в теплоцентраль, регулируется подачей в нее перегретого пара. Таким или близким к этому способом регулируется температура горячей воды во всех городских теплоцентралях. Регулирование происходит с помощью датчика температуры, задающего устройства и регулятора с выходными сигналами соответственно xft), g(t) и u(t), а также исполнительного механизма, осуществляющего посредством регулирующего клапана дозированную подачу перегретого пара в теплоноситель (воду)
Полное перемешивание воды и пара наступает на расстоянии около 40. 60 м от места подачи перегретого пара в магистральный трубопровод Поэтому чувствительный элемент датчика температуры устанавливается на расстоянии s, примерно равном 50 м от места ввода перегретого пара
Количество горячей воды, перекачиваемой по теплотрассе, изменяется в зависимости как от времени года, так и от времени суток. Поэтому скорость потока горячей пароводяной смеси максимальна в зимние дневные часы, а в ночные летние минимальна В связи с этим нетрудно заметить, что в изучаемом ТП присутствует существенное запаздывание между моментами подачи перегретого пара в магистральный трубопровод и обнаружения реакции на эту подачу с помощью датчика температуры При этом время реакции на изменение подачи перепетого пара определяется отмеченным временем запаздывания т = s/v^ (где v^ - скорость потока смеси) и практически не зависит от времени переходного процесса в датчике температуры, те рассматриваемый ТП относится к апериодическим объектам управления с ПЗ
Проблема управления таким объектом усложняется тем, что, во-первых, время ПЗ, как отмечалось, в течение года многократно меняется и, во-вторых, существенным образом (в ~ 5 7 раз) изменяется значение коэффициента передачи объекта ko Это изменение определяется нестабильностью параметров перегретого пара и существенной нелинейностью характеристик клапана в зависимости от положения его регулирующего органа
|
|
Из сказанного следует что процесс стабилизации температуры теплоносителя на входе в теплоцентраль относится к нестационарным ТП с ПЗ Управление такими процессами с помощью традиционных
ПИ пегулято- ^ис ^ Структурная схема ТП стабилиза-пов с 111ИМ ^ии температуры теплоносителя тепло-
преобразова- Ч^грали
РК — регулирующий клапан, ИП — инте-
г-' гральный электропривод, ЗУ - задающее гих извест- устройство, ДТ - датчик температуры, ТЗ -Hbix способов транспортное устройство, ПП - перегретый управления, пар, v, - скорость воды, v„ - скорость переописанных, гретого пара, Vc - скорость смеси
|
|
|
Рис 3 Пропорционально-интегральный регулятор |
|
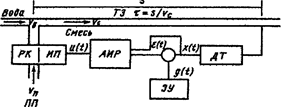
Рис 2 Структурная схема АИР ДФ дифференцирующий 4>ильтр, ФУ формирователь управления ИМ импульсный модулятор ИЭП интеграль ный электропривод ИЗ - идентификатор запаздывания ВК временной квантова тель, ИКПО - идентификатор коэффициента передачи объекта |
буемую, достаточно высокую степень стабилизации темпе ратуры горячей воды в теплоцентрали при суточных и сезонных изменениях режимов ее ра боты
В статье предлагается эффективный метод управления рас сматриваемым процессом в классе разрывных (импульсных) систем управления с идентификаторами параметров 777 и соответствующей им коррекцией настраиваемых параметров регулятора
Предлагаемое управление обеспечит близкую к оптимальной в смысле критерия
![]()
— отработку низкочастотных возмущающих f(t) [см
формулу (1)] и задающих g(t) воздействий (е ошибка регулирования)
Импульсное управление объектом, представляющим собой "чистое" запаздывание, когда а, = 0 (< = 2 3, , п+1) [см выражение (1)], - оптимальное в смысле (2) управление при отработке, например, ступенчатых воз мущающего f(t) и задающего g(t) воздействий Время переходного процесса при таком импульсном управле нии равно времени запаздывания При наличии динамических параметров (а > 0) эффективность импульсного управления снижается, однако в случае ПЗ продолжает оставаться сравнительно высокой
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.