
«Изучение САР с промежуточным импульсом и каскадной САР с односторонней автономностью в VisSim 3.0»
ЦЕЛЬ РАБОТЫ
1. Освоить настройку и анализ САР с промежуточным импульсом в VisSim 3.0.
2. Освоить настройку и анализ каскадной САР с односторонней автономностью в VisSim 3.0.
Методика выполнения работы
1. Изучить теоретические сведения о САР с промежуточным импульсом.
2. Выполнить задание по моделированию САР в соответствии с вариантом.
3. Изучить теоретические сведения о каскадной САР с односторонней автономностью.
4. Выполнить задание по моделированию САР в соответствии с вариантом.
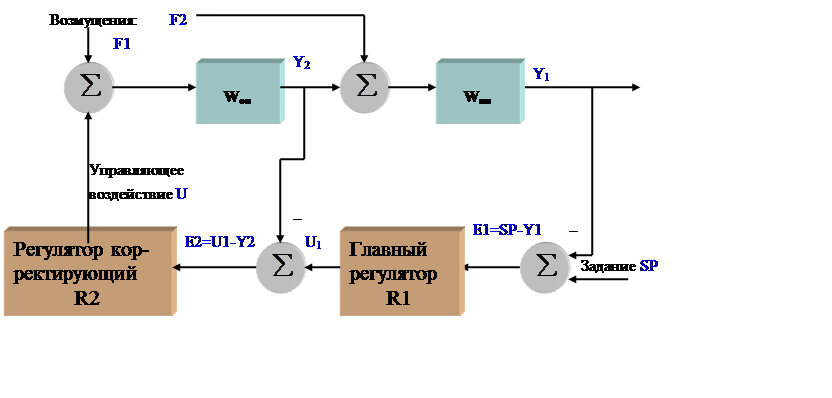
Обычная каскадная САР осуществляет стабилизацию основной (инерционной) регулируемой переменной Y1 с помощью главного регулятора, воздействующего на задание корректирующему регулятору вспомогательной (менее инерционной) переменной Y2. При этом динамические свойства объекта по обоим каналам могут задаваться либо независимо друг от друга (как в обычной каскадной САР), либо в виде импульса из промежуточной точки (рис. 1).
В САР с промежуточным импульсом объект представляет собой последовательное соединение опережающей части с передаточной функцией Wоп(s) и инерционной с передаточной функцией Wин(s).
Этот тип каскадной САР (как и САР с опережающим импульсом) применяется чаще всего для управления инерционными технологическими процессами с распределенными по пространственной координате переменными.
|
|
Рис. 1. Схема САР с промежуточным импульсом
Однако в отличие от САР с опережающим импульсом, где вспомогательная переменная вводится только для улучшения качества регулирования основной переменной, в каскадной САР обычно оба контура регулирования (и внутренний, и внешний) имеют также и самостоятельное значение, а воздействие главного регулятора на задание корректирующему, кроме эффекта опережения для лучшей стабилизации основной регулируемой переменной Y1, преследует цель координации совместной работы обоих контуров (причем не только в динамике, но и в статике).
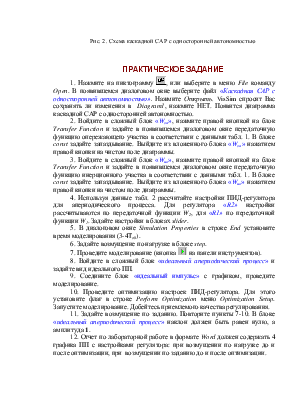
ПРАКТИЧЕСКОЕ ЗАДАНИЕ
1.Откройте папку Program Files\ VisSim FAP-VisSim
3.0 и запустите программу файлом VisSim 3.0 или щелчком
мыши на ярлыке ![]() на рабочем
столе. Появится чистое поле для диаграмм. Для корректного воспроизведения
шрифтов в готовом файле необходимо установить нужный набор символов. Для этого
выберите в меню View команду
Fonts. Появится диалоговое окно, в этом окне
выберите шрифт Arial, и набор символов Кириллица.
на рабочем
столе. Появится чистое поле для диаграмм. Для корректного воспроизведения
шрифтов в готовом файле необходимо установить нужный набор символов. Для этого
выберите в меню View команду
Fonts. Появится диалоговое окно, в этом окне
выберите шрифт Arial, и набор символов Кириллица.
2. Нажмите на пиктограмму ![]() , или выберите в меню File команду
Open. В появившемся
диалоговом окне выберите файл «САР с промежуточным
импульсом». Нажмите Открыть. VisSim
спросит Вас сохранять ли изменения в Diagram 1,
нажмите НЕТ. Появится диаграмма САР с промежуточным импульсом.
, или выберите в меню File команду
Open. В появившемся
диалоговом окне выберите файл «САР с промежуточным
импульсом». Нажмите Открыть. VisSim
спросит Вас сохранять ли изменения в Diagram 1,
нажмите НЕТ. Появится диаграмма САР с промежуточным импульсом.
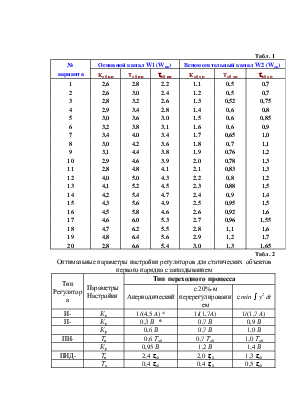
3. Войдите в сложный блок «Wоп», нажмите правой кнопкой на блок Transfer Function и задайте в появившемся диалоговом окне передаточную функцию опережающего участка в соответствии с данными табл. 1. В блоке const задайте запаздывание. Выйдите из вложенного блока «Wоп» нажатием правой кнопки на чистом поле диаграммы.
4. Войдите в сложный блок «Wин», нажмите правой кнопкой на блок Transfer Function и задайте в появившемся диалоговом окне передаточную функцию инерционного участка в соответствии с данными табл. 1. В блоке const задайте запаздывание. Выйдите из вложенного блока «Wин» нажатием правой кнопки на чистом поле диаграммы.
5. Используя данные табл. 2 рассчитайте настройки ПИД-регулятора для апериодического процесса. Для регулятора «R2» настройки рассчитываются по передаточной функции Wоп, а для «R1» – по Wин. Задайте настройки в блоках slider.
6. В диалоговом окне Simulation Properties в строке End установите время моделирования (3-4Тоб).
7. Задайте возмущение по нагрузке в блоке step.
8. Проведите моделирование (кнопка ![]() на панели инструментов).
на панели инструментов).
9. Войдите в сложный блок «идеальный апериодический процесс» и задайте вид идеального ПП.
10. Соедините блок «идеальный импульс» с графиком, проведите моделирование.
11. Проведите оптимизацию настроек ПИД-регулятора. Для этого установите флаг в строке Perform Optimization меню Optimization Setup. Запустите моделирование. Добейтесь приемлемого качества регулирования.
12. Задайте возмущение по заданию (уберите возмущение по нагрузке), отключите оптимизацию, повторите пункты 8-11. В блоке «идеальный апериодический процесс» наклон должен быть равен нулю, а амплитуда 1.
13. Отчет по лабораторной работе в формате Word должен содержать 4 графика ПП с настройками регулятора: при возмущении по нагрузке до и после оптимизации, при возмущении по заданию до и после оптимизации.
КАСКАДНАЯ САР С ОДНОСТОРОННЕЙ АВТОНОМНОСТЬЮ
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
В каскадной САР с односторонней автономностью применена динамическая развязка контуров каскадной САР с помощью компенсатора, обеспечивающая независимость ошибки внутреннего контура по отношению к управляющему действию главного регулятора (рис.2).
Здесь за основу берется описанная выше каскадная САР с использованием импульса из промежуточной (по пространственной координате) точки, ориентированная на управление распределенными технологическими процессами. Объект управления задается в виде последовательного соединения опережающей части – с передаточной функцией Wоп (s) и инерционной – с передаточной функцией Wин(s).
Компенсатор, включаемый в цепь воздействия главного регулятора на задание корректирующему регулятору, представляет собой динамическое звено с передаточной функцией, являющейся оценкой передаточной функции опережающего участка объекта Wоп(s). Т.к. эта оценка определяется в системе в виде инерционных звеньев 1-го или 2-го порядка, то компенсатор легко реализуется в современных контроллерах. Кроме того, в данной схеме предусматривается и непосредственное (помимо корректирующего регулятора) воздействие главного регулятора на исполнительный механизм, т.е. управляющее воздействие САР на исполнительный механизм U является суммой выходных сигналов главного и корректирующего регуляторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.