
Министерство образования Российской Федерации
КРАСНОЯРСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ
ЦВЕТНЫХ МЕТАЛЛОВ И ЗОЛОТА
Институт Металлургии
Кафедра АПП
Группа АМЦ-99-2
Дисциплина СА
ОТЧЁТ
о лабораторной работе №9
Изучение пакета Simulink системы MATLAB 6 для моделирования, имитирования и анализа систем управления
(2 вариант)
Преподаватель Буралков А.А.
Студент Варзанов А.А.
КРАСНОЯРСК 2003
Протокол выполнения работы
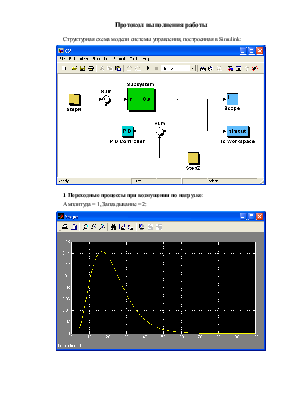
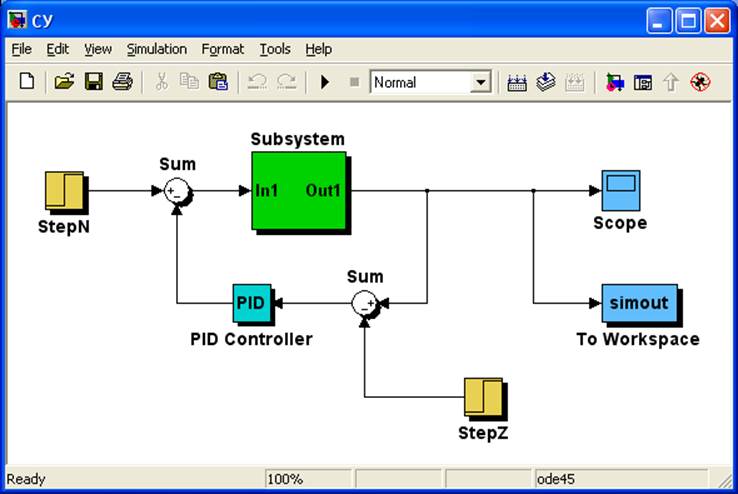
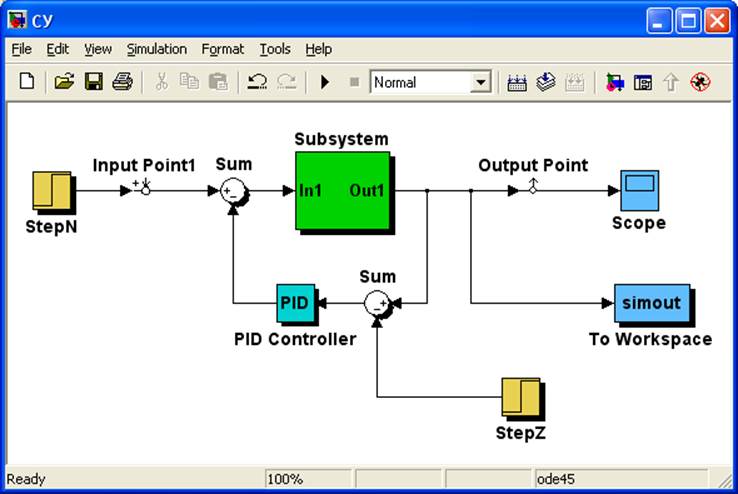
Структурная схема модели системы управления, построенная в Simulink:
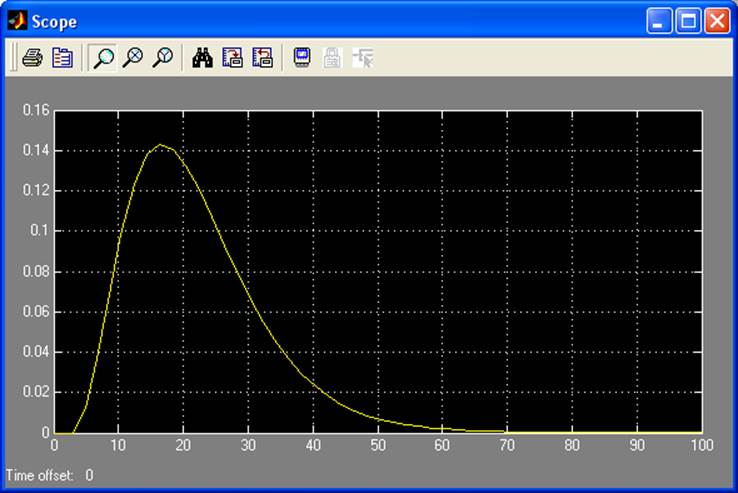
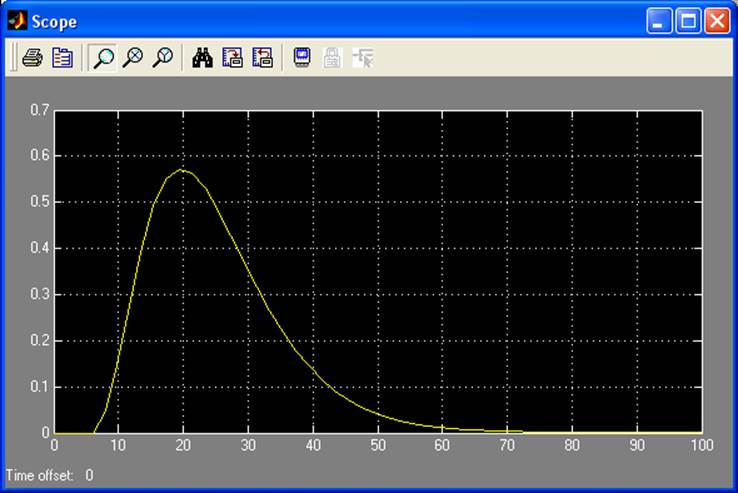
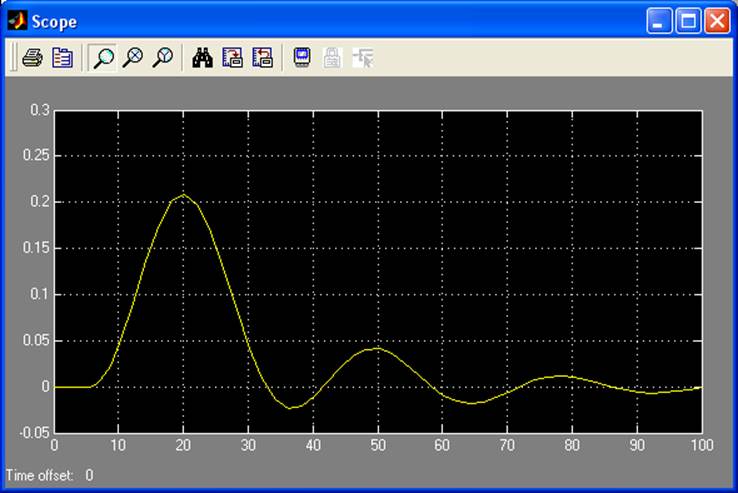
1 Переходные процессы при возмущении по нагрузке:
Амплитуда = 1, Запаздывание = 2:
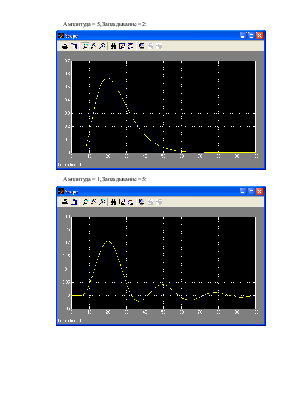
Амплитуда = 5, Запаздывание = 2:
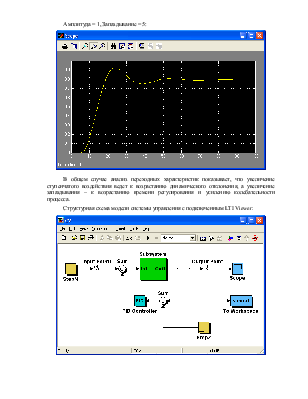
Амплитуда = 1, Запаздывание = 5:
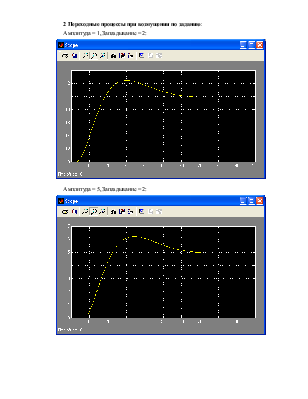
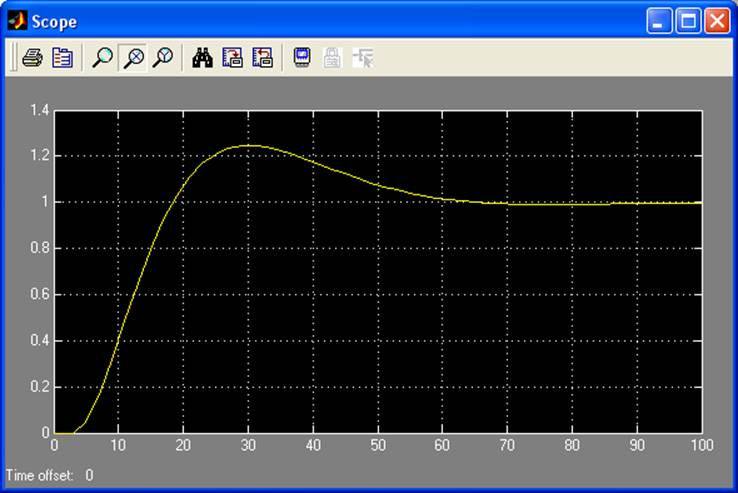
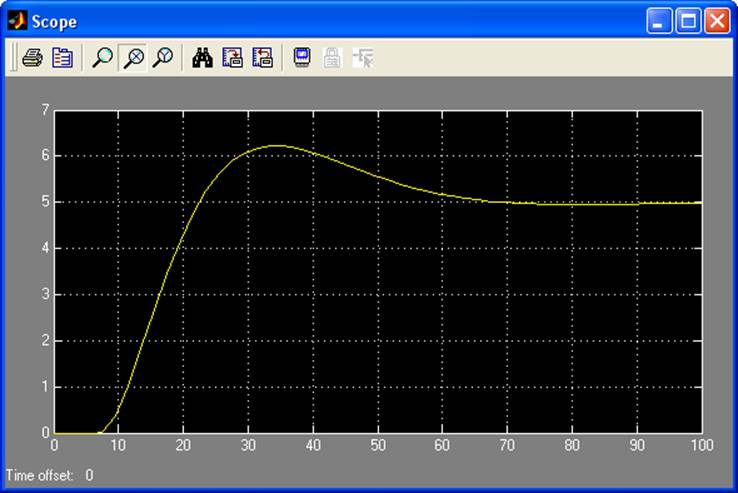
2 Переходные процессы при возмущении по заданию:
Амплитуда = 1, Запаздывание = 2:
Амплитуда = 5, Запаздывание = 2:
Амплитуда = 1, Запаздывание = 5:
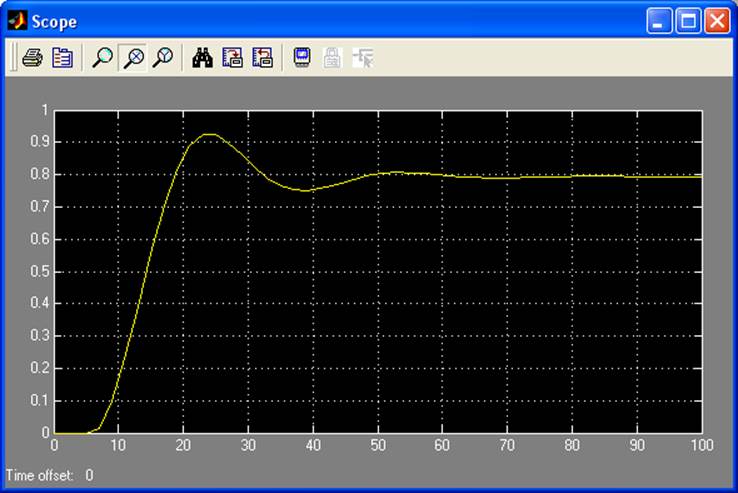
В общем случае анализ переходных характеристик показывает, что увеличение ступенчатого воздействия ведет к возрастанию динамического отклонения, а увеличение запаздывания – к возрастанию времени регулирования и усилению колебательности процесса.
Структурная схема модели системы управления с подключенным LTI Viewer:
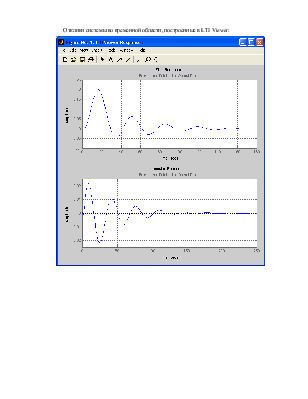
Отклики системы во временной области, построенные в LTI Viewer:
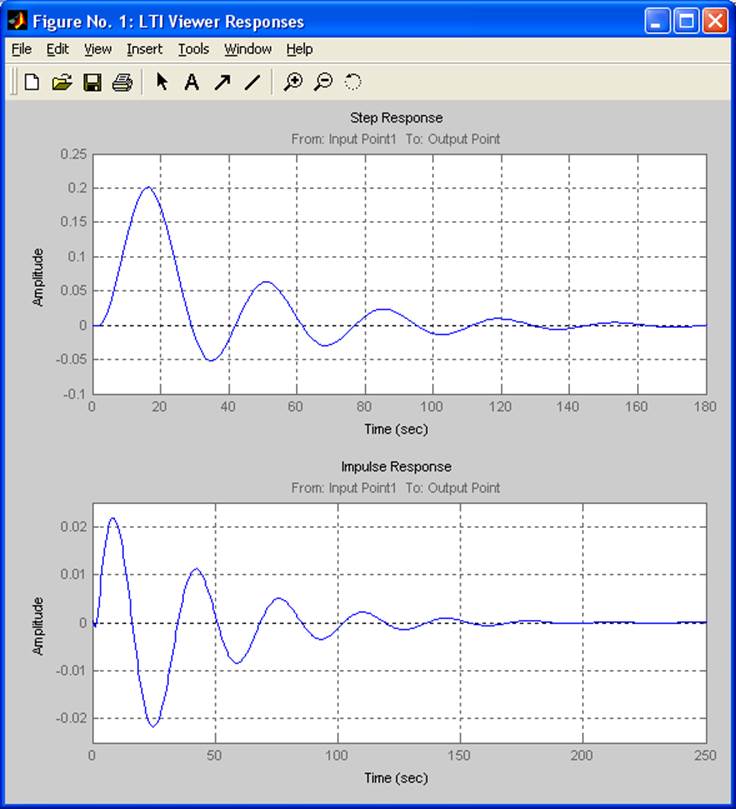
☺
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.