Переходной процесс на рисунке 12 колебательный с затухающими колебаниями, время регулирования 21 секунда, максимальное динамическое отклонение 0,98, степень затухания 0,49. Добьемся улучшения качества процесса регулирования нашей системы с помощью пакета IPC-CAD.
Сначала произведем анализ работы нашей системы с использованием одноконтурной САР. Произведем настройку регулятора одноконтурной САР. Выберем последовательно пункты меню “Настройка одноконтурной САР”, “Расчет параметров регулятора”. Затем выберем рекомендованный программой ПИ-регулятор, и вид процесса “С умеренным затуханием”.
Выберем вид воздействия “Скачок” и произведем моделирование переходного процесса системы с регулятором (рисунок 13).
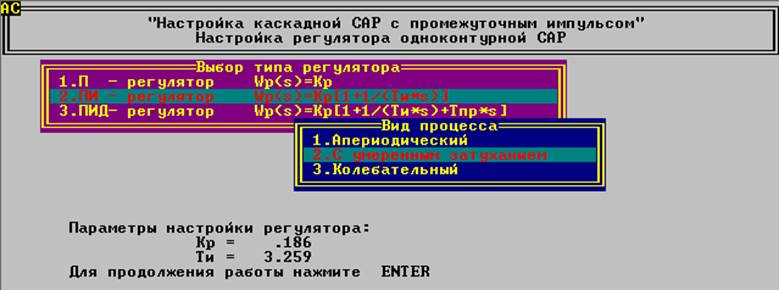
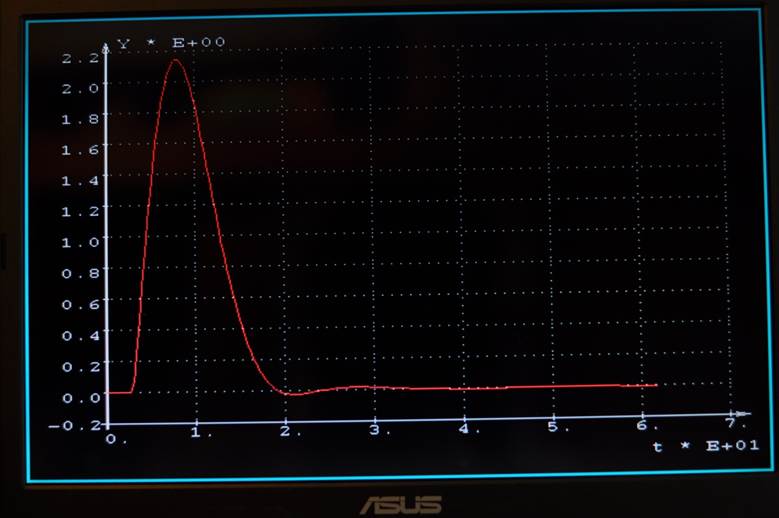
Рисунок 13 – Переходной процесс одноконтурной САР
Показатели качества переходного процесса:

Качество процесса регулирования неудовлетворительное, производим оптимизацию параметров системы с помощью пакета IPC-CAD.
Проверим САР на грубость и получим переходной процесс (рисунок 14).
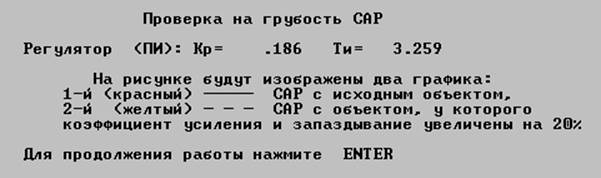
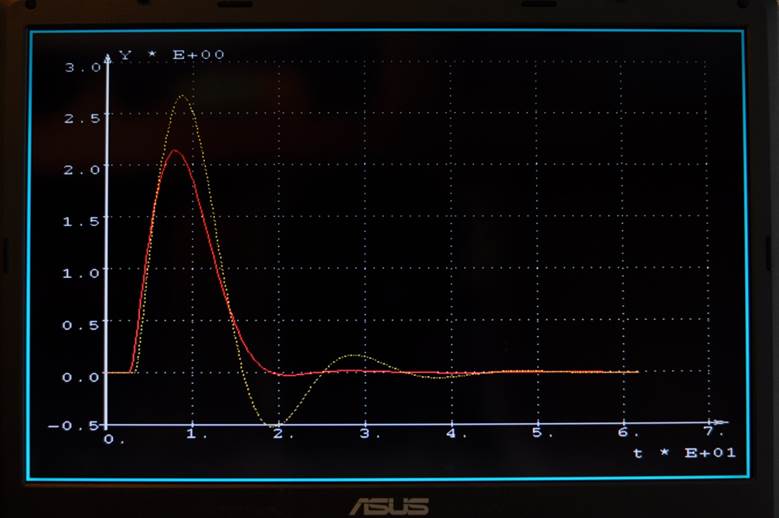
Рисунок 14 – Переходные процессы одноконтурной САР с исходным объектом и с объектом, у которого коэффициенты усиления и запаздывания увеличены на 20%
Показатели качества переходного процесса исходной системы:
Показатели качества переходного процесса системы с увеличенными коэффициентами:

При увеличении коэффициентов усиления и запаздывания на 20%, максимальная динамическая ошибка возрасла на 24.6%, степень затухания уменьшилась на 5.43%, время регулирования возросло на 37.1%, что свидетельствует об ухудшении качества переходного процесса и уменьшении устойчивости.
Для улучшения качества процесса регулирования произведем оптимизацию параметров регулятора методом поиска. Оптимизацию проводим с использованием критерия ITAE, варьируя коэффициентом усиления и временем изодрома. На рисунке 15 изображены переходные процессы нашей одноконтурной САР до оптимизации и с оптимальными настройками регулятора.
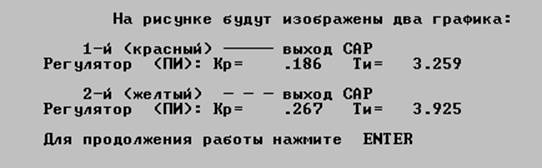
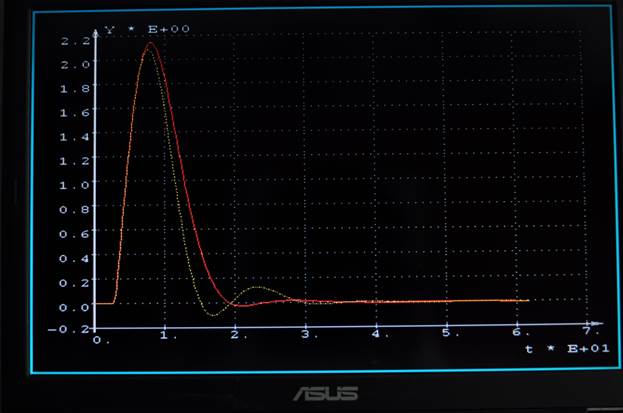
Рисунок 15 – Переходные процессы одноконтурной САР до оптимизации и с оптимальными настройками регулятора
Показатели качества переходного процесса системы до оптимизации:
Показатели качества переходного процесса системы с оптимальными настройками регулятора:

При оптимальных настройках регулятора, максимальная динамическая ошибка уменьшилась на 6.5%, степень затухания уменьшилась на 5.3%, время регулирования уменьшилось на 16.7%, что свидетельствует об улудшении качества переходного процесса, а следовательно, об успешно проведенной оптимизации системы.
Произведем анализ работы нашей системы с использованием каскадной САР с промежуточным импульсом.
Произведем оптимальную настройку корректирующего регулятора каскадной САР с промежуточным импульсом. Выберем последовательно пункты меню “Настройка САР с промежуточным импульсом”, “Настройка регулятора R2 каскадной САР ”, “ Расчет параметров регулятора”. Затем выберем рекомендованный программой тип регулятора (ПИ-регулятор), вид процесса “С умеренным затуханием ”. Выберем пункт меню “Выбор внешних воздействий”, затем вид внешнего воздействия “Возмущение на входе объекта (по нагрузке)”, вид воздействия “Скачок” и произведем моделирование переходного процесса системы (рисунок 16).
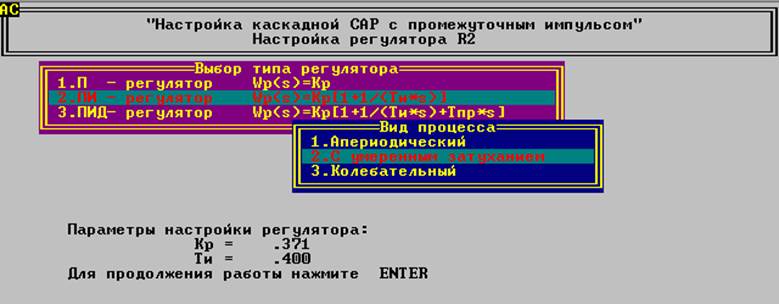
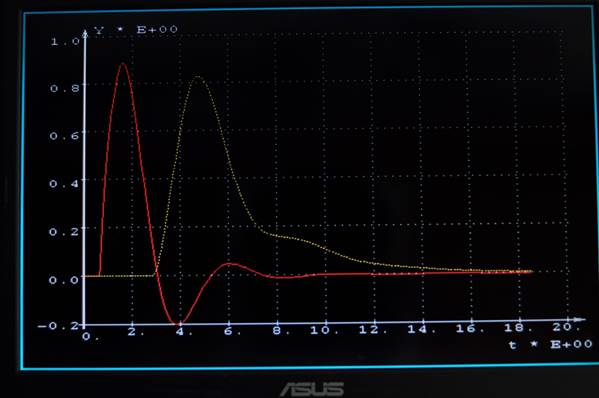
Рисунок 16 – Переходные процессы каскадной САР с промежуточным импульсом
Показатели качества переходного процесса каскадной САР:

Качество процесса регулирования неудовлетворительное, производим оптимизацию параметров системы с помощью пакета IPC-CAD.
Проверим САР на грубость и получим переходной процесс (рисунок 17).
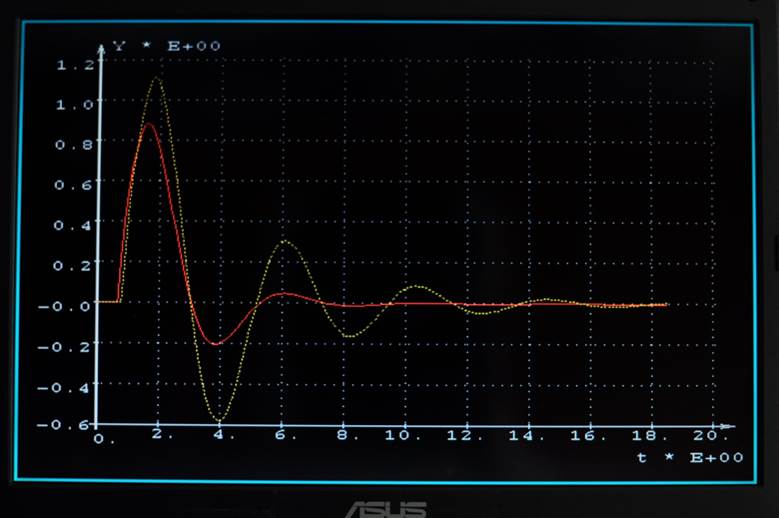
Рисунок 17 – Переходные процессы каскадной САР с промежуточным импульсом с исходным опережающим участком, и со опережающим участком, у которого коэффицинт усиления и запаздывание увеличенны на 20%
Показатели качества переходного процесса исходной системы:
Показатели качества переходного процесса системы с увеличенными коэффициентами:
Максимальная динамическая ошибка = 1.12
Степень затухания = 0.464
Время регулирования = 13
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.