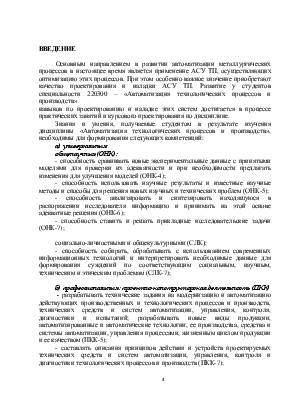


















































График возмущающего воздействия X(t) и кривая разгона объекта – изменение уровня воды ∆H(t) представлен на рисунке 1.4.
Рисунок 1.4 – График возмущающего воздействия и кривая разгона объекта
Единичная DH0(t) переходная функция определяется по следующей формуле:
DH0(t) = DH(t) / A,
где A – скачкообразное возмущающее воздействие, при котором снята переходная характеристика (А = 3 % ХРО).
Результаты расчётов единичной переходной функции сведены в таблицу 1.5.
Таблица 1.5 – Ординаты единичной переходной функций
|
t, с |
0 |
2 |
5 |
10 |
15 |
20 |
25 |
30 |
|
ΔH0,мм |
0,000 |
0,000 |
0,050 |
0,100 |
0,200 |
0,300 |
0,400 |
0,500 |
Окончание таблицы 1.5
|
t, с |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
130 |
150 |
|
ΔH0,мм |
0,750 |
1,000 |
1,220 |
1,400 |
1,600 |
1,750 |
1,97 |
2,530 |
2,82 |
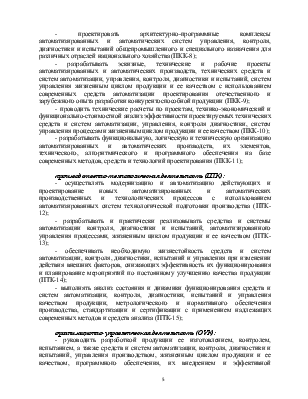
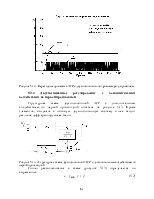
На рисунке 1.5 приведена единичная переходная характеристика.
Рисунок 1.5 – Единичная переходная характеристика
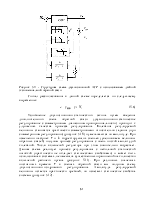
При аппроксимации объекта последовательным соединением астатического звена и звена запаздывания его передаточная функция будет иметь вид [1.2, с. 90-93; 1.3, с. 226-239]:
|
|
Динамические характеристики объекта:
- запаздывание объекта определяется как отрезок времени (0; t), на котором выполняется равенство DH0(t) =0; по графику на рисунке 1.5 и таблице 1.5 определяем t = 2 с;
- коэффициент передачи объекта определяется как тангенс
угла наклона прямой, соответствующей средней скорости изменения уровня, т.е. Kоб = 0,0188  .
.
Таким образом, аппроксимирующая передаточная функция примет вид:
|
|
Для оценки точности аппроксимации экспериментальной переходной функции решением дифференциального уравнения первого порядка с запаздывающим аргументом рассчитываются ординаты аппроксимирующей кривой:
|
|
|
|
|
Далее вычисляются разности dап:
|
и ошибки между ординатами переходных функций δi:
|
Результаты расчётов сведены в таблицу 1.6.
Таблица 1.6 – Ординаты переходных функций
|
t, с |
0 |
2 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
|
|
0,00 |
0,00 |
0,11 |
0,32 |
0,50 |
0,75 |
0,93 |
1,12 |
1,30 |
1,50 |
1,67 |
|
|
0,00 |
0,00 |
0,15 |
0,34 |
0,53 |
0,71 |
0,90 |
1,10 |
1,28 |
1,47 |
1,65 |
|
dап×102 |
0,00 |
0,00 |
0,16 |
0,04 |
0,09 |
0,16 |
0,09 |
0,04 |
0,04 |
0,09 |
0,04 |
|
δi,% |
0 |
0 |
12,1 |
3,5 |
4,2 |
4,6 |
3,1 |
1,9 |
1,8 |
2,5 |
1,6 |
Окончание таблицы 1.6.
|
t, с |
100 |
130 |
150 |
|
|
1,88 |
2,43 |
2,78 |
|
|
1,84 |
2,41 |
2,78 |
|
dап×102 |
0,16 |
0,04 |
0 |
|
δi,% |
2,9 |
1,3 |
0 |
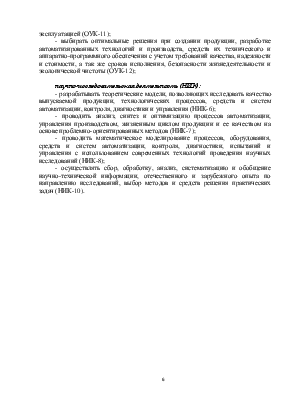
Используя данные таблицы 1.6 строим исходную и аппроксимирующую единичные переходные функции (рисунок 1.6) и визуально оцениваем степень их близости.
Далее вычисляем среднюю ошибку аппроксимации δср:
Так как средняя ошибка аппроксимации менее 3% считаем найденное математическое описание котла по каналу: изменение подачи воды - уровень воды в барабане приемлемым.
Рисунок 1.6 – Единичные переходные характеристики: 1 – исходная;
2 – аппроксимирующая
1.3. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Под математическим описанием объекта регулирования понимается совокупность уравнений статики и динамики. Первые описывают, характер связей между входными и выходными координатами объекта в установившемся режиме работы и в подавляющем большинстве случаев являются алгебраическими уравнениями типа
y=f(x1, x2,…, xk), k≤2÷5,
где у- выходная регулируемая координата (давление, концентрация, температура и т.д.), (x1, x2,…, xk) - входные (возмущающие или регулирующие) координаты. Функция f чаще, всего нелинейна, однако не имеет разрывов первого и второго рода и может быть линеаризована в определенном интервале изменения x1, x2,…, xk.
Уравнения динамики характеризуют поведение выходной координаты объекта y в переходном режиме работы, т.е. при изменении какой-либо из координат x1, x2,…, xk. Динамика объекта описывается дифференциальными уравнениями в полных или частных производных (реже — интегральными уравнениями).
Составление математического описания технологического объекта является достаточно трудной задачей, однако без знания уравнений статики и динамики невозможно построение качественно работающей системы автоматического регулирования.
При составлении математического описания объекта управления определяются его статические (коэффициент усиления - Kоб, а иногда и вид статической зависимости) и динамические (запаздывание - t, постоянные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 .
. .
.