где dj0,1 = Dj0 -Dj1 - составляющая измерений, обусловленная аппаратурными фазовыми сдвигами,. Учитывая, что она может быть определена и скомпенсирована, здесь будем полагать ее равной нулю.
Необходимо учитывать, что при длине волныl@ 0,2 м, много меньшей длины базовой линии (a >> l ),результаты фазовых измерений следует представлять в виде:
![]() ,
,
где N0,1- целое число отрезков l, составляющих определяемую разность растояний, первоначально неизвестное (задача его нахождения, решаемая различными известными способами, здесь не рассматривается);
 |
В записи получаемого результата ya будем учитывать далее как указанный выше аппаратурный фазовый сдвиг dj0,1 = dja , так и случайную погрешность измерений s(ya). Обозначая также r0 - r1 = Dra , разделив ya на 2p и умножив на l, получим:
где dra иs(Dra) - составляющие разности расстояний, обусловленные соответственно инструментальным фазовым сдвигом фазометра и случайной погрешностью измерений.
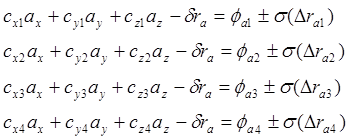
Учитывая, что разность расстояний для i-го ИСЗ Drai = cxi ax + cyi a y + czi az = | a | cos qi, получим
![]() ( 5.5.)
( 5.5.)
![]()
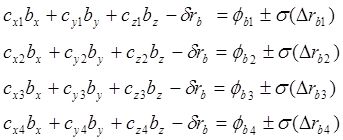
Располагая результатами фазовых измерений по 4-м НИСЗ, составляя и решая систему из 4-х уравнений, определим при использовании рассмотренных ранее алгоритомов искомые ax , a y , az , dra .
5.3. Определение параметров угловой
пространственной ориентации судна![]()

 |
|||||
![]()
 |
|||
для нахождения проекций ax , a y , az отрезка a на оси OXг, OYг и OZг горизонтной системы координат, в центре которой установлена 0-я антенна.
Более
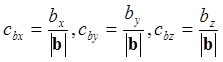
удобно угловые положения отрезков a и b выразить через их направляющие косинусы 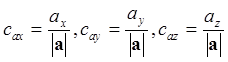 и
и ![]()
матричными уравнениями вида
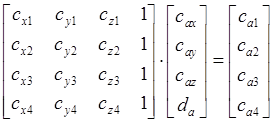 ,
,
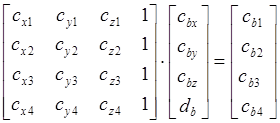 ; ( 5.6 )
; ( 5.6 )
где 
 ;
; 
 ,
,
![]()
![]() - углы
между отрезками (векторами)
- углы
между отрезками (векторами) ![]() ,
, ![]() и направлениями на i-й
ИСЗ.
и направлениями на i-й
ИСЗ.
5.3.2. Располагая
величинами направляющих косинусов для отрезков ![]() и
и ![]() , можем определить угловые
параметры судна, которыми будем считать:
, можем определить угловые
параметры судна, которыми будем считать:
- истинный курсИ - угол между направленной на север осью ординат OгYг и проекцией продольной оси Ос Xcсудна на плоскость YгOгXг;
- дифферент Д - угол между осью Ос Xc и плоскостью YгOгXг;
- крен К - угол между поперечной осью Ос Yc и плоскостью YгOгXг (см. рис. 5.4, построенный при совмещении центров Oг и Oс горизонтной и судовой систем координат).
Используя известные из аналитической геометрии или стереометрии зависимости, получим к равенства:
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
позволяющие явно выразить углы И, К,Д через направляющие косинусы
 ,
, ![]() ,
, ![]() . ( 5.7 )
. ( 5.7 )
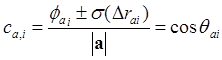
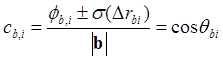
Необходимые направляющие косинусы определяются по формулам п.4.1.4 (с соответствующей заменой обозначений)
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Получаемые данным способом параметры при отсутствии крена (К = 0) совпадают по величине с аналогичными величинами, определения которых используются в теории устройства судна.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.