

8.4. C-NAV- новая концепция использования СРНС Навстар
Дифференциальная подсистема C-Nav. разработан Лабораторией реактивного движения Калифорнийского технического института для повсеместного использования и основан на принципе Real Time Gypsy (RTG). Принцип работы спутниковой подсистемы C-Nav похож на работу других систем, таких как WAAS, но всё-таки это не традиционная DGPS система.
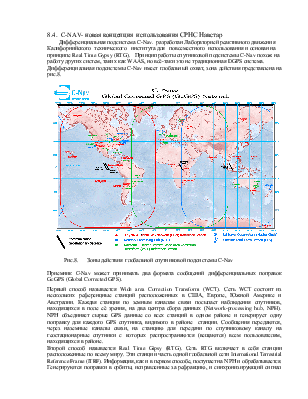
Дифференциальная подсистемы C-Nav имеет глобальный охват, зона действия представлена на рис.8.
Рис.8. Зоны действия глобальной спутниковой подсистемы C-Nav
Приемник C-Nav может принимать два формата сообщений дифференциальных поправок GcGPS (Global Corrected GPS).
Первый способ называется Wide area Correction Transform (WCT). Сеть WCT состоит из нескольких референцные станций расположенных в США, Европе, Южной Америке и Австралии. Каждая станция по земным каналам связи посылает наблюдения спутников, находящихся в поле её зрения, на два центра сбора данных (Network-processing hub, NPH). NPH объединяет сырые GPS данные со всех станций в одном районе и генерирует одну поправку для каждого GPS спутника, видимого в районе станции. Сообщения передаются, через наземные каналы связи, на станцию для передачи по спутниковому каналу на геостационарные спутники с которых распространяются (вещаются) всем пользователям, находящихся в районе.
Второй способ называется Real Time Gipsy (RTG). Сеть RTG включает в себя станции расположенные по всему миру. Эти станции часть одной глобальной сети International Terrestrial Reference Frame (ITRF). Информация, как и в первом способе, поступает на NPH и обрабатывается. Генерируются поправки в орбиты, исправленные за рефракцию, и синхронизирующий сигнал для каждого спутника. Поправки также передаются по наземным каналам на станцию для передачи на спутники Inmarsat и последующего их вещания пользователям.
Пользователь может получать любую из этих поправок, вещаемых со спутника, и использовать их со своими наблюдениями. В результате откорректированные GPS данные, скорость и время передаются из C-Nav приёмника в другие узлы системы платформы (судна,траспортного средства) для получения требуемой точности положения. C-Nav GPS система и сервис передачи поправок оптимизированы таким образом, что приемниками можно пользоваться, как на референцной станции, так и в подвижном режиме. Этот подход позволяет пользователям применять поправки в реальном времени и не зависеть от атмосферных поправок вычисленных на отдаленной референцной станции.
За последние 20 лет исследований Лаборатория Реактивного Движения Калифорнийского Института превратилась в один из главных центров по исследованию точности определения орбит. На протяжении шести лет группа ЛРД разрабатывала, осваивала и совершенствовала алгоритм RTG.
Два основных фактора вычисляются для передачи пользователю:
1. Поправка за синхронизацию времени для каждого GPS спутника вычисляется каждые насколько секунд. Эта поправка основана на исправленных измерениях преломленных волн и оптимизированна под двухчастотные приемники пользователей.
2. Поправки в орбиты для каждого спутника вычисляются каждые несколько минут. Вычислению этих поправок помогают данные со станции глобальной сети ITRF, что позволяет определять их с достаточной точностью и избыточностью.
3. RTG Сбор данных
Получаемые GPS данные включают в себя двухчастотные фазовые измерения с разрешением 0.02 мм, измерения дальности с разрешение 1 мм и информацию об эфемеридах. В NPH эти данные собираются центральной вычислительной программой, которая сортирует их согласно временной метки, отбрасывает дублированные передачи и делает запрос о ретрансляции пропущенных пакетов данных. В точно установленные время ожидания, через 2 и 6 секунд, все данные с общими эпохами записываются в буфер памяти. Вообще, эти два буфера памяти содержат те же самые данные, однако данные, которые прибывают поздно, типа ретранслируемых данных, заносятся в 6-секундный буфер. RTG использует этот буфер для обработки орбит спутников, так как они более медленно изменяются. Для синхронизации времени используется 2-секундный буфер.
Все поправки группируются в одном 560 битном сообщение. Каждое сообщение содержит x, y и z поправки в орбиту спутника, метровый уровень синхронизации времени (meter-level clock corrections) для 4 GPS спутников PRNs и сантиметровый уровень синхронизации времени (cm-level clock corrections) для 32 GPS спутников PRNs. Полное коррекция времени это сумма этих двух поправок. Требуется 8 секунд, чтобы инициализировать все 32 орбиты и синхронизировать время. Разрешение синхронизации времени - 1.5625 см, что в 8 раз лучше, чем WAAS разрешение, которое составляет 12.5 см. Разрешение орбитальных исправлений - 6.25 см. Обновление происходит каждые две минуты, этого времени достаточно, чтобы накопить новую информацию.
Глобальная сеть референцные станций используется для отслеживания траекторий GPS спутников и пересылке сырых GPS измерений в NPH. NPH вычисляет и моделирует, в режиме реального времени, для каждого спутника поправки. Эти поправки передаются мобильному пользователю через геостационарные спутники.
Сервис поправок WTC доступен только в определённых районах: США, Европа, Южная Америка и Австралия. Сервис поправок RTG доступен глобально.
В зависимости от необходимой точности система C-Nav может работать с в двух режимах выдачи поправок: SF1 и SF2. Первый режим обеспечивает определение места с точностью до 1 метра, второй, по заявлению фирмы производителя, обеспечивает точность до 1 дециметра.
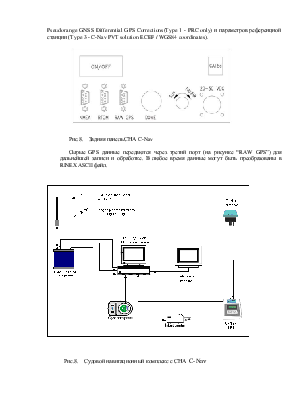
8. Оборудование
Мобильный комплекс путниковой аппаратуры C-Nav состоит из трёх основных компонентов: С-Nav Antenna, GPS receiver, L-Band communication RF detector and decoder;
C-Nav control display unit
;Соединительный кабель
С-Nav Antenna –это основной модуль системы, в который входят GPS приёмник, спутниковый коммуникационный модуль для приема корректирующих данных и процессор.
C-Nav control and display unit предназначен для контроля за работой системы и вывода данных на Com ports.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.