Уст(П5)- поскольку данное движение является простым, то для него внутренней связью является кинематическая пара. . Внешняя кинематическая связь начинается от рукоятки на станке.
Уст(В3)- поскольку данное движение является простым, то для него внутренняя связь- это кинематическая пара: ползун-круговые направляющие. Внешняя связь начинается от рукоятке на станке.
Всп(П6)-простое движение, поэтому внутренней связью является кинематическая пара: ползун-направляющая. Внешняя связь начинается от вспомогательного электродвигателя ЭМ4, поскольку в данном станке предусмотрено ускоренное перемещение суппорта станка.
ЭМ4- 
Всп(П5) )-простое движение, поэтому внутренней связью является кинематическая пара: ползун-направляющая. Внешняя связь начинается от вспомогательного электродвигателя ЭМ5, поскольку в данном станке предусмотрено ускоренное перемещение стойки 64(рис.1)
ЭМ5-
ФV(В1 В2)- сложное движение с замкнутой траекторией, следовательно, необходимо настроить 3 параметра: F, N, V.
Траектория F1. Траекторию необходимо настроить с точностью: dI=0.
Поскольку данное движение сложное, то необходимо согласовать вращение фрезы и заготовки: В1 ®В2
Траекторию
движения ФV(В1 В2) настраивают из ходя из
условия : за один оборот фрезы заготовка должна совершить ![]() оборотов, где k- число заходов
фрезы, z- число зубьев нарезаемого колеса.
оборотов, где k- число заходов
фрезы, z- число зубьев нарезаемого колеса.
1об.ф. ® ![]() об.з.
об.з.
Исходя из структурной схемы станка (рис.4.) имеем:
Перейдя к кинематической схеме станка (рис.1.) имеем:

Органом
настройки траектории данного движения является гитара обката 
Передаточное отношение дифференциала iå =1, так как движение передается на главный вал.
Зубчатые колеса e и f служат для расширения диапазона регулирования сменных
колес гитары и так как в данном случае z£161, то e:f=1Следовательно,
 .
.
Так как настраивается траектория, то dI=0.
 .
.
Проверка
: 
Направление будет настраиваться в гитаре обката с помощью паразитного колеса.
Скорость
V1. Так как
данное движение сложное, то настраивая скорость у одного, автоматически
настраивается и у другого движения. 
Исходя из структурной схемы станка (рис.4.) имеем:
![]()
Перейдя к кинематической схеме станка (рис.1.)имеем:
Погрешность настройки скорости:
Степень точности передачи-6
Направление N1. Направление движения изменяется при помощи паразитного колеса в гитаре скорости.
ФS(В2П4)-сложное движение с незамкнутой траекторией, следовательно, необходимо настроить 5 параметров:F,N,L,R,V.
Траектория F2. Траекторию необходимо настроить с точностью: настраиваем с точностью ∆В=5 мкм (рис.5.), что соответствует 6-ой степени точности нарезаемого колеса.
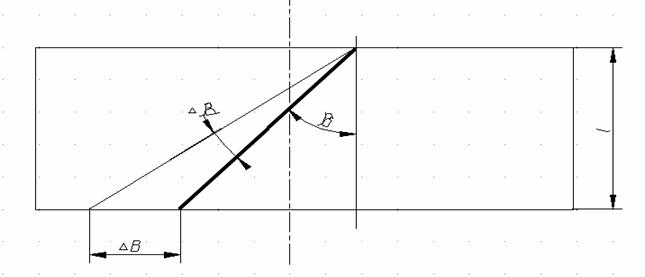
Рис. 5. Погрешность D Вр.
Поскольку данное движение сложное, то необходимо согласовать поступательное движения фрезы П4 с вращением заготовки В2.
Траекторию движения ФS(В2 П4) настраиваем исходя из условия , что за один оборот заготовки фреза переместится на величину шага винтовой линии РВ.Л.
РВ.Л. найдем из треугольника DEF(
рис. 6.):  .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.