МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИНОВОСИБИРСКИЙ ГОСУДАРСТВЕНННЫЙТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАФЕДРА ТЕПЛОВЫХ ЭЛЕКТРИЧЕСКИХ СТАНЦИЙ КУРСОВАЯ РАБОТА По предмету: «Динамика и регулирование» Факультет: ЗО ФЭНГруппа: ЭТз-21уВыполнил: студент А.В.Титов Проверил: доцент, к.т.н. В.В. Пак Отметка о защите: НОВОСИБИРСК 2006 |
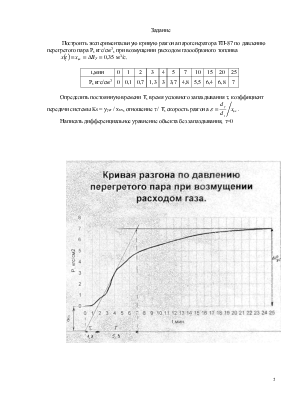
Построить экспериментальную кривую разгона парогенератора ТП-87 по давлению перегретого пара Р, кгс/см2, при возмущении расходом газообразного топлива
![]() м3/с.
м3/с.
|
t,мин |
0 |
1 |
2 |
3 |
4 |
5 |
7 |
10 |
15 |
20 |
25 |
|
Р, кгс/см2 |
0 |
0,1 |
0,7 |
1,3 |
3 |
3,7 |
4,8 |
5,5 |
6,4 |
6,8 |
7 |
Определить
постоянную времени Т, время условного запаздывания t, коэффициент передачи системы KS = ууст
/ хвх, отношение t / Т, скорость
разгона  .
.
Написать дифференциальное уравнение объекта без запаздывания, t=0
 |
Решение.
1.По заданным значениям изменения давления по времени строим экспериментальную кривую разгона парогенератора ТП-87 по давлению перегретого пара при возмущении расходом топлива. Проводим касательную к кривой и находим значения: T, t, b.
Постоянная времени Т = 5,3 мин.= 318 сек.,
соответствует отрезку на линии установившегося значения выходной величины,отсекаемому касательной к кривой разгона в наиболее крутом участке кривой.
Время условного запаздывания t=1,7 мин.=102 сек.,
соответствует отрезку на оси времени, отсекаемому касательной к кривой разгона.
b = 2,25 кгс/см2
Находим скорость разгона e - угловой коэффициент наклона касательной к кривой разгона в наиболее крутой части, снятой при единичном входном воздействии.

Степень самовыравнивания:

![]() Коэффициент передачи системы - отношение
установившегося значения к значению ступенчатого возмущения.
Коэффициент передачи системы - отношение
установившегося значения к значению ступенчатого возмущения.

Отношение t / Т = 1,7/5,3 = 0,32
2. Написать дифференциальное уравнение объекта без запаздывания, t=0.
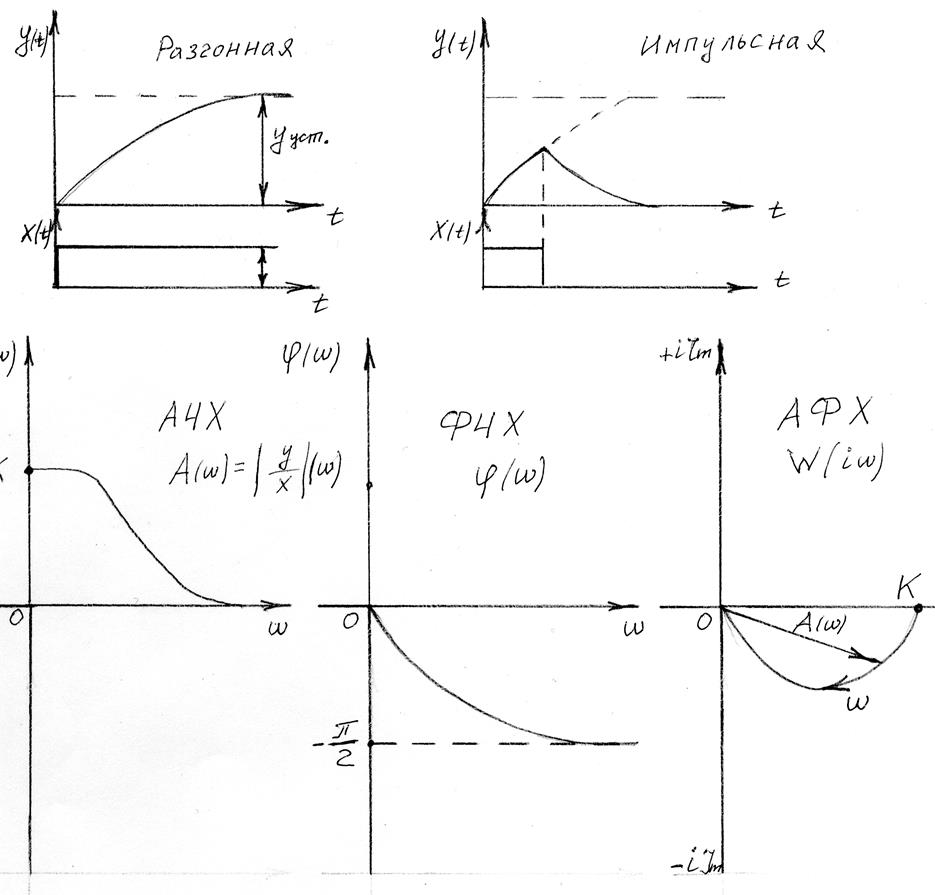
Без запаздывания характеристика объекта описывается дифференциальным уравнением инерционного звена первого порядка.
Решением
уравнения будет экспонента вида 
гдеР1-корень характеристического уравнения
 ; Р1= -
; Р1= -![]()
y(t)= ,
,
Т -
постоянная времени (![]() )
)
К –
коэффициент усиления (![]() )
)
хвх – величина входного параметра
y – величина выходного параметра
тогда
3.Передаточная функция для этого апериодического звена без запаздывания (при t=0) будет иметь вид:
При
![]() ,с запаздыванием:
,с запаздыванием:
 |
4. Исходя из полученных характеристик объекта для апериадического звена с запаздыванием(КS,t,Т) найти оптимальное значение настроечных параметров П- регулятора и ПИ-регулятора, приближенным методом ВТИ, используя формулы приведенные в таблице3, для степени затухания y=0,75 и степени колебательности m=0,221.
Учитывая приведенные условия по запасу устойчивости (y=0,75 и m=0,221) можно сделать вывод, что система является устойчивой.
Найдем оптимальные значения настроечных характеристик регуляторов, приближенным методом ВТИ.
Определим
отношение 
Для П-регулятора:
Коэффициент усиления регулятора:

Время сервомотора:
![]() сек.
сек.
Оптимальное время сервомотора:
![]() сек.
сек.
Для ПИ-регулятора.
Коэффициент усиления регулятора будет тот же:
Время интегрирования:
![]() сек.
сек.
Время сервомотора:
![]() сек.
сек.
Оптимальное время сервомотора:
![]() сек.
сек.
Этот метод расчета настройки регулятора является приближенным. Метод позволяет получить лишь предварительные значения настроечных параметров, которые должны уточняться в процессе наладки регулятора.
5. Дать анализ преимуществ ПИ-регулятора над П-регулятором и И-регулятором.
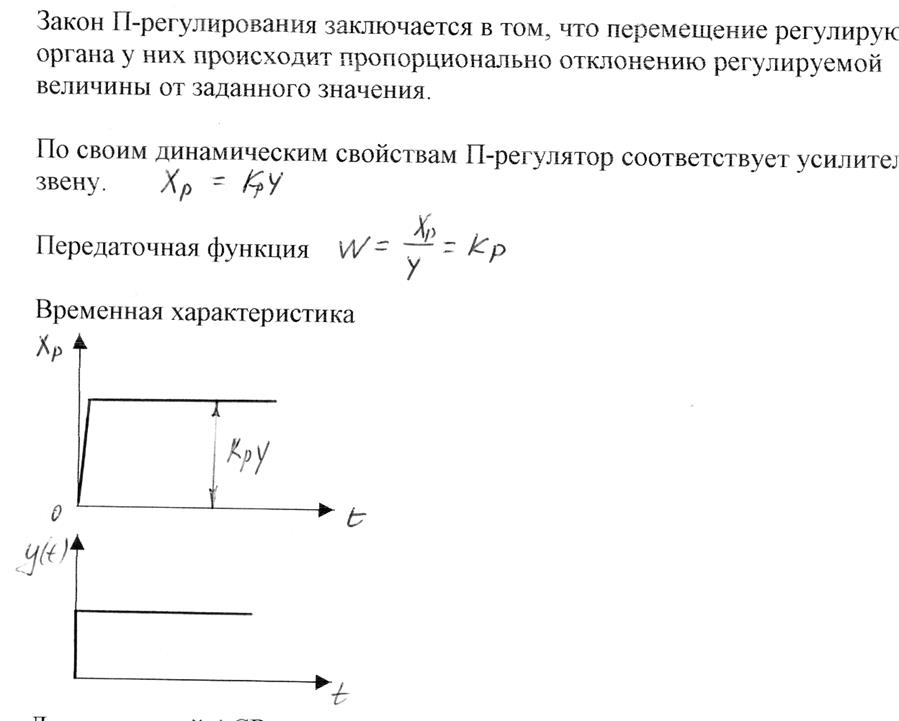
Основное свойство П-регуляторов заключается в том, что перемещение регулирующего органа у них пропорционально отклонению регулируемой величины от заданного значения. Пропорциональный закон регулирования в П-регуляторах с использованием постороннего источника энергии достигается путем ввода в схему регулятора жесткой обратной связи по положению регулирующего органа или по величине регулирующего воздействия. П-регуляторы этого типа называют регуляторами с жесткой обратной связью (статическими). Увеличение воздействия жесткой обратной связи способствует уменьшению колебательности процесса, но при этом возрастает статическая неравномерность регулирования, то есть увеличивается отклонение регулируемой величины при переходе к новому установившемуся режиму. П-регулятор регулирует с неравномерностью. В этом его недостаток, но устойчивость регулирования обеспечивается и в случае объекта без самовыравнивания.
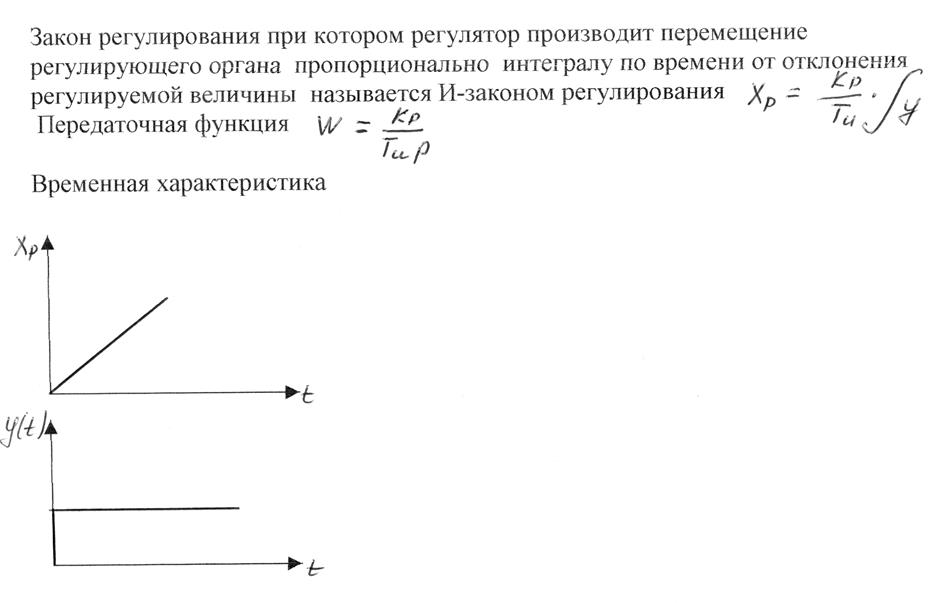
И-регуляторы формируют регулирующее воздействие на объект пропорционально интегралу по времени при отклонении регулируемой величины от заданного значения. Замкнутая система автоматического регулирования с И-регулятором относится к числу астатических, так как независимо от нагрузки регулируемого объекта установившееся состояние в системе достигается лишь при равенстве нулю рассогласования регулируемой величины от заданного значения. Таким образом значение регулируемой величины при постоянном задании остается неизменным независимо от нагрузки и положения регулирующего органа. При регулировании И-регулятором объекта без самовыравнивания процесс имеет колебательный характер с незатухающими периодическими колебаниями регулируемой величины относительно заданного значения, переходящее в расходящие преиодические колебания (система идет в «разгон»).
 ПИ-регулятор
совмещает в себе свойства статического (П) и астатического (И) регуляторов.
Благодаря этому достигается быстродействие и обеспечивается устойчивость
регулирования; исключается статическая ошибка (неравномерность) регулирования).
ПИ-регулирование осуществляют путем применения упругой обратной связи в
зависимости от нагрузки. Эти свойства ПИ-регуляторов привели к тому, что они
широко применяются при автоматизации различных объектов.
ПИ-регулятор
совмещает в себе свойства статического (П) и астатического (И) регуляторов.
Благодаря этому достигается быстродействие и обеспечивается устойчивость
регулирования; исключается статическая ошибка (неравномерность) регулирования).
ПИ-регулирование осуществляют путем применения упругой обратной связи в
зависимости от нагрузки. Эти свойства ПИ-регуляторов привели к тому, что они
широко применяются при автоматизации различных объектов.
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.