1. Цель работы:определение ускорения поступательного движения грузов на машине Атвуда, момента сил трения в подшипниках.
2. Теоретические основы.
 Лабораторная установка (система) состоит из двух
грузов одинаковой массы m, закрепленных на концах легкой нерастяжимой нити,
перекинутой через блок (рис. 1).
Лабораторная установка (система) состоит из двух
грузов одинаковой массы m, закрепленных на концах легкой нерастяжимой нити,
перекинутой через блок (рис. 1).
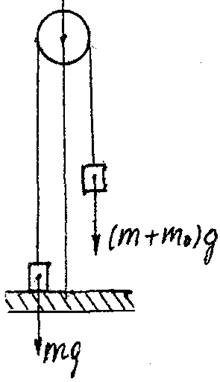
Рассмотрим 4 варианта состояния системы.
Вариант 1. Массы правого и левого грузов равны между собой. Силы натяжения, создаваемые правым и левым грузами одинаковы и противоположны.
F1 = F2 = mg
Система неподвижна. Ускорение a1 = 0.
Вариант 2. На правый груз помешают перегрузок m0. Масса блока и сила трения на оси блока не учитываются. Возникает дополнительная сила
F0 =m0g (1)
Эта сила приводит систему в движение с ускорением a2. Согласно второму и третьему законам Ньютона, движение грузов системы общей массой (2m + m0) вызывает противодействующую силу
|
Приравнивая (1) и (2) определяем ускорение
a2 = m0g/(2m + m0) (3)
Вариант 3. Учтем влияние момента инерции блока JБ на движение системы. Согласно основному закону динамики вращательного движения момент силы МБ на блоке равен:
МБ = JБe (4)
Где e - угловое ускорение вращения блока, равное
e = а3/RБ (5)
где а3 - линейное ускорение движения грузов.
В то же время момент силы МБ можно представить как
МБ = FБRБ (6)
Где FБ - сила, вызванная противодействием блока,
RБ - радиус шкива (внешний радиус блока).
Решая совместно (4), (5), (6), получим
FБ = a3JБ/RБ2 (7)
Сила противодействия FБ со стороны блока вызвана за счет ускорения e вращения блока.
Уравнение действующей силы F0 равно сумме противодействующих сил
F0 = F0’ + FБ, то есть
m0g = (2m + m0)a3 + JБa3/RБ2
Ускорение системы с учетом влияния момента инерции блока
a3 = m0g/(2m + m0 + JБ/RБ2) (8)
Вариант 4. Учтем момент трения в подшипниках блока.
Мтр = FтрRБ или Fтр = Мтр/RБ,
где Мтр - сила трения, приведенная к нити.
Уравнение действующей и противодействующих сил примет вид
F0 = F0’ + FБ + Fтр или
m0g = (2m + m0 + JБ/RБ2)а4 + Мтр/RБ
Отсюда ускорение движения грузов
a4 = (m0g – Mтр/RБ)/(2m + m0 + JБ/RБ2) (9)
Для определения Мтр, подбирается такой минимальный перегрузок m', при котором начнется перемещение грузов в установке Атвуда. В этом случае момент сил трения определяется по формуле
Мтр = m’gRБ (10)
Момент инерции блока RБ в формулах (8), (9) равен
JБ = mБRБ2/2 (11)
Где m’ - масса блока.
Фактическое ускорение движения грузов аф определяется экспериментально, исходя из кинематического уравнения движения
h = aфt2/2
Откуда
аф = 2h/t2 (12)
где h- высота, с которой опускается правый груз,
t - время опускания груза.
3. Описание экспериментальной установки.
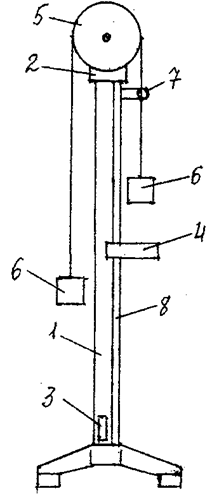 Схема экспериментальной установки представлена на
рис.2. На вертикальной стойке 1 закреплены два кронштейна 2 и 4. На кронштейне
2 закреплен блок 5. Через блок перекинута нить малой массы с грузами 6 на
концах. На кронштейне 2 закреплен также
Схема экспериментальной установки представлена на
рис.2. На вертикальной стойке 1 закреплены два кронштейна 2 и 4. На кронштейне
2 закреплен блок 5. Через блок перекинута нить малой массы с грузами 6 на
концах. На кронштейне 2 закреплен также
|
4. Порядок выполнения работы.
1) Установить кронштейн с ограничительной площадкой на выбранной высоте h.
2) Убедиться, что система находится в безразличном равновесии. Положить на правый груз перегрузок массой m0 (no указанию преподавателя).
3) Подключить к установке блок питания, соединив два гнезда на блоке с гнездами "БП" на колодке установки.
4) Подключить к установке электронный секундомер, соединив два гнезда на секундомере с гнездами "Сек." на колодке установки.
5) Подключить блок питания и секундомер к сети 220 В. Включить электропитание секундомера, установив тумблер на лицевой панели в положение "Вкл.".
6) Установить груз с перегрузком в исходное положение, подняв их вверх до упора, предварительно отключив тормоз нажатием клавиши 3 (положение 2).
7) Включить тормоз нажатием клавиши 3 (положение 1).
8) Нажатием кнопки "Сброс" на секундомере установить показания индикаторов на ноль.
9) Привести систему в движение, установив клавишу 3 в положение 2: тормоз отключается, а секундомер начинает отсчет времени.
10) В момент касания грузом опорной площадки - установить клавишу 3 в положение 1: секундомер остановится. Для определения времени движения груза t показание секундомера умножить на коэффициент К = 2. Полученный результат занести в таблицу.
11) Повторить измерения 5 раз, выполнив пункты 6, 7, 8, 9, 10.
12) Выключить секундомер, установив тумблер на лицевой панели в нижнее положение.
13) Отключить блок питания и секундомер от сети.
14) Определить минимальный перегрузок m', при котором начинается перемещение грузов.
5. Данные установки и таблица результатов измерений.
Масса каждого из грузов m = 120 г. Масса перегрузка m0 = 3-12 г (по указанию преподавателя). Ускорение свободного падения g = 9,81 м/с2. Масса блока mБ = 109,7 г. Радиус блока RБ = 70 мм.
Таблица результатов данных.
|
№ замера |
t, с |
(ti - tср)2 |
|
1 |
||
|
2 |
||
|
3 |
||
|
4 |
||
|
5 |
||
|
Средн. |
å |
6. Обработка результатов измерения.
1) Вычислить момент инерции блока JБ по Формуле (11).
2) Вычислить момент трения Мтр в блоке по формуле (10).
3) Вычислить ускорения а2, а3, а4 по формулам (3), (8), (9).
4) Вычислить среднее время опускания груза t, используя замеры в таблице.
5) Вычислить фактическое ускорение аф по формуле (12).
6) Сравнить ускорения а2, а3, а4, аф и проанализировать результаты.
7) Определить результирующую погрешность Δt в установленном порядке.
8) Рассчитать погрешности косвенного измерения dаф и Δаф по формулам
dаф = 2dt = 2Δt/t, Δаф = dаф*аф
9) Записать результат аф, с учетом погрешности и с указанием на доверительную вероятность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.