Взаимная индуктивность меняется от изменения полного магнитного сопротивления ZM цепи, либо от взаимного перемещения обмоток.
Tрансформаторные преобразователи конструктивно имеют много общего с индуктивными преобразователями, отличаясь от них наличием второй системы обмоток.
В настоящее время широко применяются вращающиеся трансформаторы и сельсины. Вращающиеся трансформаторы имеют, как правило, по две взаимно перпендикулярных обмотки на роторе и статоре. Вращающиеся трансформаторы приспособлены для работы в одном из двух режимов: режиме синусно-косинусного вращающегося трансформатора (СКВТ) и режиме линейного вращающегося трансформатора (ЛВТ).
На одну из обмоток статора подается напряжение питания U1. Выходные напряжения U2 и U3 снимаются с обмоток ротора, развернутого относительно статора на угол j. Сопротивления R1, R2 и Rз подбирают таким образом, чтобы ток I1 в обмотке питания оставался постоянным для любого угла j. Выходные напряжения преобразователя равны:
 где w1 и w2 -- соответственно число витков в
каждой из обмоток статора
и ротора.
где w1 и w2 -- соответственно число витков в
каждой из обмоток статора
и ротора.
Синусно-косинусные вращающиеся трансформаторы различаются по классам точности. Для наиболее высокого класса точности допустимая погрешность составляет величину порядка одной угловой минуты.
В процессе работы погрешности могут появиться вследствие неправильного подбора сопротивлений в схеме, нестабильности напряжения и частоты питания, изменений рабочей температуры преобразователя.
Разновидностью вращающихся трансформаторов являются сельсины. Обычные сельсины состоят из однофазной первичной и трехфазной вторичной обмоток. Трехфазные обмотки расположены в пространстве под углами 120° одна относительно другой. Сельсины используются для работы в режиме дистанционной передачи угла и в трансформаторном режиме.
Сельсины могут быть использованы в трансформаторном режиме как устройства, измеряющие разность угловых перемещений. Рабочий диапазон измеряемых угловых разностей обычно не превышает 30°, при этом погрешность нелинейности составляет ±2%.
Сельсины изготовляются по трем классам точности. Они обеспечивают точность работы, характеризуемую погрешностями от 0,1 до 2,5°.
|
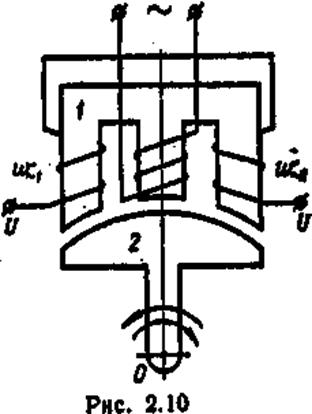
На среднем стержне Ш-образного сердечника 1 имеется первичная обмотка, к которой подводится напряжение питания переменного тока. На двух крайних стержнях располагаются две одинаковых вторичных обмотки w1 и w2, включаемые в схему последовательно и встречно. Подвижной частью датчика является якорь 2, поворачивающийся вокруг точки 0. Если якорь 2 занимает нейтральное симметричное положение относительно крайних
стержней, то магнитное сопротивление обеих выходных обмоток одинаково и, следовательно, одинаковы коэффициенты взаимной индукции между каждой из выходных обмоток и первичной обмоткой трансформатора. В этом случае в обмотках наводятся равные по амплитуде и противоположные по фазе э.д.с., что соответствует выходному напряжению U=0. Поворот якоря 2 в ту или иную сторону вызывает увеличение или уменьшение магнитного сопротивления для одного крайнего стержня и противоположное изменение магнитного сопротивления для другого крайнего стержня сердечника. Это приводит к соответствующим изменениям коэффициентов взаимной индукции и появлению результирующей э.д.с., амплитуда которой будет зависеть от величины угла поворота якоря 2, а фаза—от направления поворота.
Перечисленные выше достоинства и недостатки индуктивных преобразователей могут быть отнесены и к трансформаторным преобразователям. Однако последние характеризуются еще такими преимуществами, как отсутствие гальванической связи между цепями входа и выхода, а также обеспечение выходного сигнала (напряжения) без дополнительных схем.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.