2. Снижение чувствительности регулировки в каскадах с эмиттерной температурной стабилизацией из-за действия отрицательной обратной связи (ООС) по постоянному току. Следовательно, эмиттерное сопротивление в таких каскадах следует брать не более минимально необходимого для осуществления температурной стабилизации.
3. Взаимное влияние практически всех параметров транзистора при изменении режима его работы. Это приводит к тому, что в процессе регулирования изменяется не только крутизна |Y21|, но также активные и реактивные составляющие входной и выходной проводимости g11, b11, g22, b22. Последнее влечет за собой расстройку контуров ib цепях базы и коллектора, а также изменение их добротностей. Поэтому приходится ограничивать связь транзистора с контурами, что ведет к потере усиления.
4. Большой уровень нелинейных эффектов.
В связи с последним целесообразно осуществлять АРУ первых каскадов приемника, работающих с малым уровнем сигнала. В то же время следует иметь ввиду, что изменение усиления первого каскада УВЧ приемника приводит к изменению его коэффициента шума, что в некоторых специальных приемных устройствах может оказаться нежелательным.
Изменение режима работы преобразовательных каскадов с целью регулирования их коэффициента преобразования приводит к возрастанию комбинационных искажений и интерференционных свистов. Поэтому в подавляющем большинстве случаев регулируемыми каскадами являются первые каскады УПЧ. При отсутствии требований к уровню шумов приемника в качестве регулируемых каскадов часто используются и каскады УВЧ.
Пассивные ЭР делятся на потенциометрические (ПР) и мостовые (MP).
Регуляторы типа ПР в зависимости от способа включения управляемого нелинейного элемента по отношению к входному сопротивлению последующего усилителя делятся на последовательные (рис. 6.6) и параллельные (рис. 6.7). В этих схемах управляемым нелинейным элементом служит сопротивление сток — исток Rси полевого транзистора. Полевые транзисторы в качестве управляемых элементов предпочтительнее диодов и биполярных транзисторов. Это объясняется высокой линейностью сопротивления Rси, а также тем, что цепь управления полевым транзистором не потребляет мощности. Параллельный ПР эффективно работает в устройствах со сравнительно высоким входным сопротивлением Zвх, а последовательный — при низком входном сопротивлении.
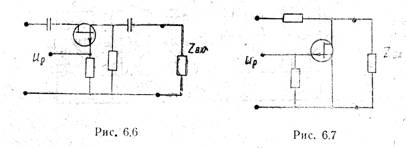
В последовательном ПР в процессе увеличения уровня сигнала величина нелинейного управляемого сопротивления возрастает (транзистор запирается), в связи с чем заметно возрастают п нелинейные искажения сигнала. Параллельный ПP в этом отношении значительно лучше последовательного.
Реализация положительных качеств ПР в области, высоких частот затруднена. Это объясняется тем, что емкость регулируемых нелинейных элементов шунтирует нелинейное сопротивление, и эффект регулировки снижается. Компенсация емкости регулируемых нелинейных элементов в MP позволяет увеличить глубину регулировки и повысить диапазон частот эффективно регулируемого коэффициента передачи.
Один ПР в системе АРУ способен обеспечить глубину регулировки 30 — 40 дБ, а мостовой 60 — 70 дБ. Однако мостовые регуляторы сложнее, требуют тщательной настройки и имеют большую стоимость по сравнению с потенциометрическими.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.