Цель работы: освоение студентами современных методов управления технологическим оборудованием на базе программируемых цикловых устройств, приобретение навыков программирования, составления алгоритмов, построения циклограмм. Изучение работы пневматической и механической части манипулятора как исполнительного устройства систем автоматики.
Лабораторная работа состоит из двух частей, и рассчитана на 8 уч. часов, выполняемых на учебном Робототехническом Исследовательском Комплексе (РИК) в лаборатории промышленных роботов. Лабораторная работа содержит необходимые теоретические сведения, примеры, задания и контрольные вопросы.
В процессе выполнения лабораторного практикума студенты должны закрепить теоретические знания в области основных понятий, принципов управления, структуры построения робототехнических комплексов, принципов организации автоматизированного производства, а также получить практические навыки по программированию цикловых устройств управления различного типа, а также реализовать разработанные программы на реальном промышленном оборудовании, в режиме реального времени.
При подготовке к выполнению лабораторных работ, а также в процессе их выполнения, настоятельно рекомендуется просмотр необходимого учебного видеоматериала по основам робототехники в лаборатории промышленных роботов.
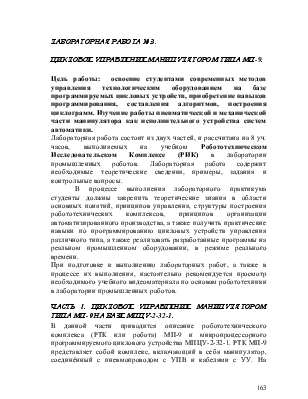
В данной части приводится описание робототехнического комплекса (РТК или робота) МП-9 и микропроцессорного программируемого циклового устройства МПЦУ-2-32-1. РТК МП-9 представляет собой комплекс, включающий в себя манипулятор, соединённый с пневмопроводом с УПВ и кабелями с УУ. На манипулятор подаётся напряжение постоянного тока (24)В от УУ, подключённого к сети переменного тока напряжением 220 В. Сжатый воздух подаётся к электропневматическим клапанам манипулятора от цеховой пневмомагистрали через УПВ, который обеспечивает регулировку необходимого давления, подачу воздуха и смазки в пневмоцилиндры. В манипуляторе на каждое движение, кроме схвата, установлено по 2 электропневматических клапана. Последовательность и количество движений манипулятора в соответствии с принятой технологической схемой, устанавливается вводом программы с пульта УУ. Сигнал о выполнении каждого движения манипулятора выдают КЭМы при подходе к ним постоянных магнитов, установленных на подвижных частях. Срабатывание КЭМов индицируется светодиодами на лицевой планке модуля ввода (МВВ). Только после получения сигнала ответа о выполнении движения (команды) происходит выдача команды на выполнение следующего движения. При отсутствии сигнала ответа от КЭМа о выполнении движения, согласно программы, манипулятор останавливается. Ниже рассматривается назначение, технические характеристики, устройство, принцип работы РТК и порядок выполнения лабораторных работ на РТК МП-9.
Микропроцессорное
программируемое цикловое устройство (в дальнейшем МПЦУ) предназначено для
циклового двухпозиционного управления манипуляторами и технологическим
оборудованием в качестве нижнего уровня комплексных систем АСУТП или локальных
устройств управления  цикловых
технологических процессов.
цикловых
технологических процессов.
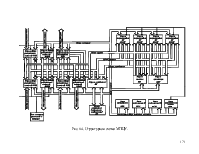
Рис.63. Микропроцессорное программируемое цикловое устройство МПЦУ-2-32-1.
1.Основные параметры изделия должны соответствовать значениям, указанным в таблице 6.
Таблица 6.
|
Наименование параметра |
Величина |
|
1.1. Число входных каналов, шт. из них: 1) предназначенных для приёма сигналов от датчиков манипулятора, соединённых со встроенным источником питания, шт. 2) предназначенных для приёма сигналов от датчиков технологического оборудования, соединённых со встроенным источником пита- ния, шт. 3) не имеющих соединения с внутренним источником питания датчиков, шт. 1.2. Число каналов управления нагрузками из них: 1) предназначенных для управления электропневмопреобразователями манипулято- ра, соединённых со встроенным источником питания 2) предназначенных для управления ме- ханизмами технологического оборудования, соединённых со встроенным источником пита- ния 3) предназначенных для управления ме- ханизмами технологического оборудования, не имеющих связи с внутренним источником пита ния 1.3. Объём памяти рабочих программ, Кбайт/команд 1.4. Сохранность рабочей программы при отключении питания, месяцев, не менее 2. Электропитание: сеть переменного тока 2.1. Напряжение, В. 2.2. Частота переменного тока, Гц. 2.3. Потребляемая мощность полная, ВА, не более |
48 32 5 11 48 32 5 11 2/1024 6 220 50 250 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.