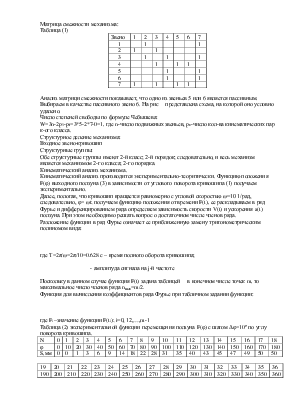
Матрица смежности механизма:
Таблица (1)
|
Звено |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
1 |
1 |
|||||
|
2 |
1 |
1 |
|||||
|
3 |
1 |
1 |
1 |
||||
|
4 |
1 |
1 |
1 |
||||
|
5 |
1 |
1 |
|||||
|
6 |
1 |
1 |
|||||
|
7 |
1 |
1 |
1 |
1 |
Анализ матрици смежности показывает, что одно из звеньев 5 или 6 является пассивным. Выбираем в качестве пассивного звено 6. На рис представлена схема, на которой оно условно удалено.
Число степеней свободы по формуле Чебышева:
W=3n-2p5-p4=3*5-2*7-0=1, где n-число подвижных звеньев, pк-число кол-ва кинематических пар к-ого класса.
Структурное деление механизма:
Входное звено-кривошип
Структурные группы:
Обе структурные группы имеют 2-й класс; 2-й порядок; следовательно, и весь механизм является механизмом 2-го класса; 2-го порядка.
Кинематический анализ механизма.
Кинематический анализ производится экспериментально-теоритически. Функцию положения F(φ) выходного ползуна (3) в зависимости от углового поворота кривошипа (1) получаем экспериментально.
Далее, пологая, что кривошип вращается равномерно с угловой скоростью ω=10 1/рад, следовательно, φ= ωt; получаем функцию положения от времени F(t), ее раскладываем в ряд Фурье и дифференцированием ряда определяем зависимость скорости V(t) и ускорения a(t) ползуна. При этом необходимо решать вопрос о достаточном числе членов ряда.
Разложение функции в ряд Фурье означает ее приближенную замену тригонометрическим полиномом вида:
где T=2π/ω=2π/10=0.628 с – время полного оборота кривошипа;
- амплитуда сигнала на j-й частоте
Поскольку в данном случае функция F(t) задана таблицей в конечном числе точек m, то максимальное число членов ряда nmax=m/2.
Функция для вычисления коэффициентов ряда Фурье при табличном задании функции:
где Fi –значение функции F(ti); i=0, 12,…,m-1
Таблица (2) экспериментальной функции перемещения ползуна F(φ) с шагом Δφ=10º по углу поворота кривошипа.
|
N |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
|
φ |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
130 |
140 |
150 |
160 |
170 |
180 |
|
S,мм |
0 |
0 |
1 |
3 |
6 |
9 |
14 |
18 |
22 |
28 |
31 |
35 |
40 |
43 |
45 |
47 |
49 |
50 |
50 |
|
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
|
190 |
200 |
210 |
220 |
230 |
240 |
250 |
260 |
270 |
280 |
290 |
300 |
310 |
320 |
330 |
340 |
350 |
360 |
|
50 |
49 |
48 |
45 |
44 |
40 |
38 |
34 |
30 |
25 |
20 |
16 |
13 |
9 |
5 |
3 |
1 |
0 |
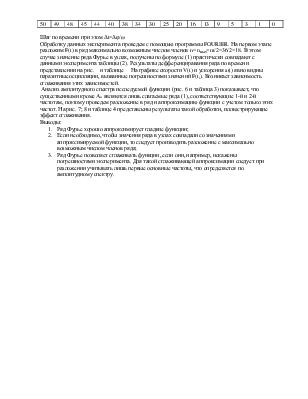
Шаг по времени при этом Δt=Δφ/ω
Обработку данных эксперимента проведем с помощью программы FOURIER. На первом этапе разложим F(t) в ряд максимально возможным числом членов n= nmax=m/2=36/2=18. В этом случае значение ряда Фурье в узлах, получены по формуле (1) практически совпадают с данными эксперимента таблицы (2). Результаты дефференциравания ряда по времени представлении на рис. и таблице На графике скорости V(t) и ускорения a(t) явно видны паразитные осцилляции, вызванные погрешностями значений F(ti). Возникает зависимость сглаживания этих зависимостей.
Анализ амплитудного спектра исследуемой функции (рис. 6 и таблица 3) показывает, что существенными кроме Ао являются лишь слагаемые ряда (1), соответствующие 1-й и 2-й частотам, поэтому проведем разложение в ряд и аппроксимацию функции с учетом только этих частот. На рис. 7; 8 и таблице 4 представлены результаты такой обработки, иллюстрирующие эффект сглаживания.
Выводы:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.